





























User Manual of iSV2-CAN Servo
www.leadshine.com
62
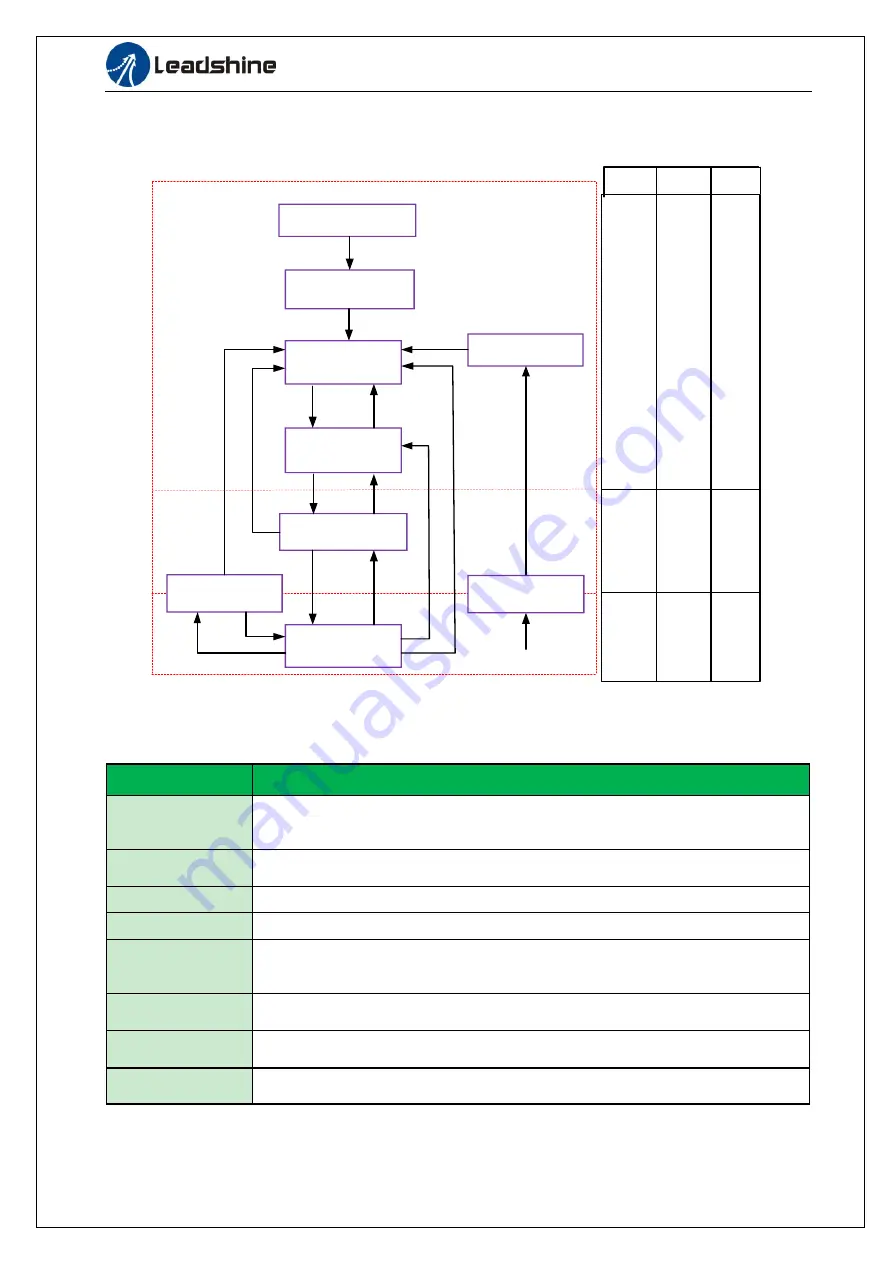
6.3 CIA 402 State Machine
Start
Initialization
No fault
Ready
Wait to switch on
Fault
Running
Quick stop
1 4
1 3
1 5
0
1
2
3
4
5
6
9
8
7
1 1
1 6
1 2
1 0
Control
power
Main
Power
Enable
Disable
ON
Disable
OFF
ON
Disable
ON
ON
Enable
ON
Stop at fault
Figue 6.1 iSV2-CAN 402 State Machine switchover diagram
The states are described in the following stable 6.2
Table 6.2 State description
States
Details
Initialization
Initialization of the servo drive and self-check have been done.
Parameter setting or drive function cannot be implemented.
If there is brake, the brake will not release, servo disabled.
No fault
No fault exists in the servo drive or the fault is eliminated
Parameter setting of the servo drive is allowed.
Ready
The servo drive is ready. Parameter setting of the servo drive is allowed.
Wait to switch on
The servo drive waits to switch on. Parameter setting of the servo drive is allowed.
Running
The servo drive is in normal running state; a certain control mode is enabled;
The motor is energized, and rotates when the reference is not 0.
Parameters with the setting condition of
‘
during running
’
can be set.
Quick stop
The quick stop function is enabled, and the servo drive executes quick stop.
Parameters with the setting condition of
‘
during running
’
can be set.
Stop at fault
A fault occurs, and the servo drive stops.
Parameters with the setting condition of
‘
during running
’
can be set.
Fault
The stop process is completed, and all the drive function are inhibited.
Parameter setting is allowed for users to eliminate faults.
The conversion of CIA402 state machine is accomplished by the control word (6040h) of the iSV2-CAN servo
system operated by the master station.







































































