





























User Manual of iSV2-CAN Servo
www.leadshine.com
44
When the duration of torque saturation reaches this value, the torque saturation signal will turn on.
1
、
Enable the torque saturation alarm, this parameter can be set to specify the output time of the torque
saturation signal
2
、
Disable the torque saturation alarm, this parameter can be set to specify the output time after the torque
limit arrives while the homing method is torque detection.
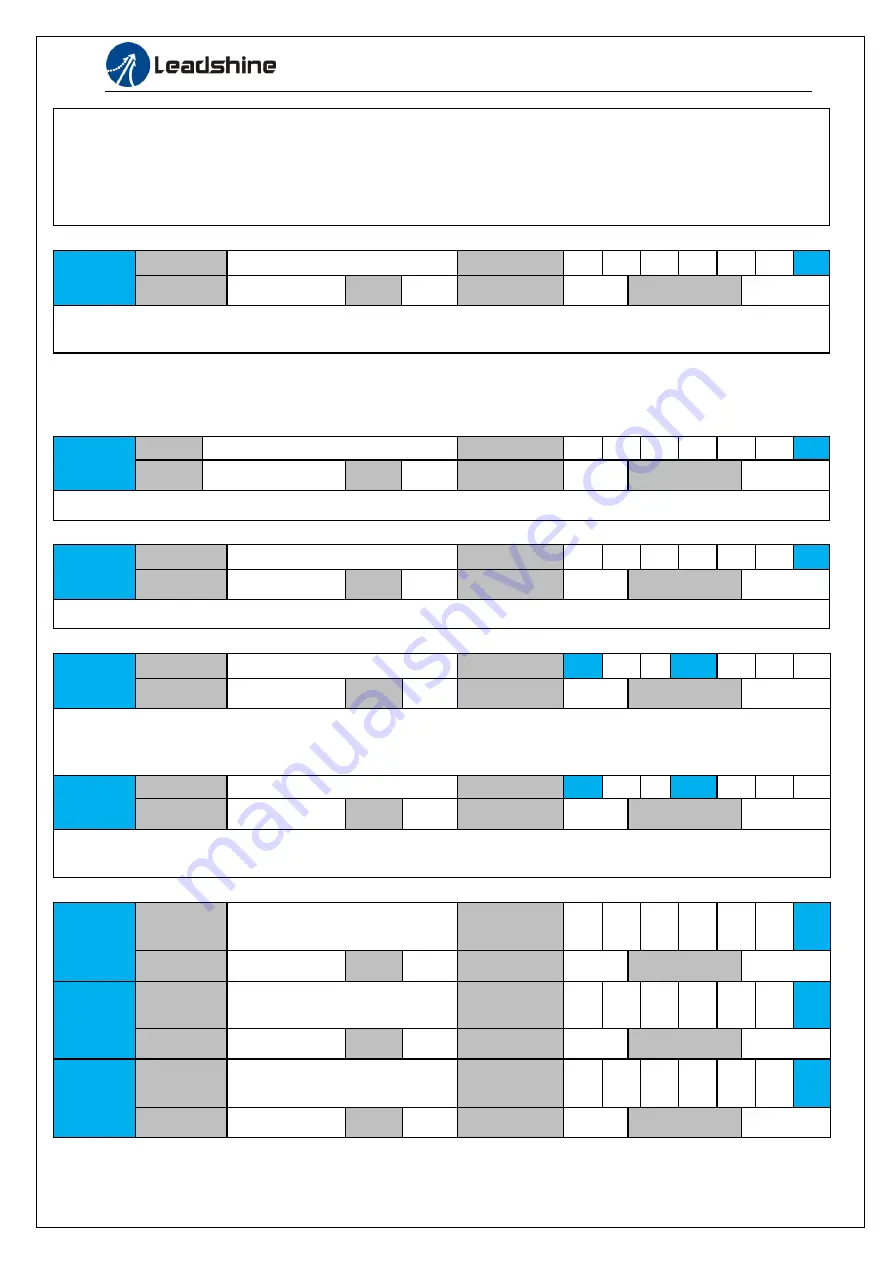
Pr5.39
Name
3rd torque limit
Mode
F
Range
0~500
Unit
%
Default
80
Index
2539h
Set the torque limit of torque limit detection homing method.
Compared with the maximum torque 6072, the actual torque limit value is smaller one.
4.2.7
【
Class 6
】
Special Setup
Pr6.01
Name
Encoder zero position compensation
Mode
F
Range
0~360
Unit
°
Default
0
Index
2601h
The Angle of the encoder after zero correction.
Pr6.04
Name
JOG trial run command speed
Mode
F
Range
0~10000
Unit
r/min
Default
300
Index
2604h
You can set up the command speed used for JOG trial run (velocity control).
Pr6.05
Name
Position 3rd gain valid time
Mode
PP
HM
Range
0~10000
Unit
0.1ms Default
0
Index
2605h
Set up the time at which 3
rd
gain becomes valid.
When not using this parameter, set PR6.05=0, PR6.06=100
This is valid for only position control/full-closed control.
Pr6.06
Name
Position 3rd gain scale factor
Mode
PP
HM
Range
0~1000
Unit
100%
Default
100
Index
2606h
Set up the 3
rd
gain by multiplying factor of the 1
st
gain
3rd gain= 1st gain * Pr6.06/100
Pr6.07
Name
Torque command additional
value
Mode
F
Range
-100~100
Unit
%
Default
0
Index
2607h
Pr6.08
Name
Positive direction torque
compensation value
Mode
F
Range
-100~100
Unit
%
Default
0
Index
2608h
Pr6.09
Name
Negative direction torque
compensation value
Mode
F
Range
-100~100
Unit
%
Default
0
Index
2609h







































































