




















EM3E Series EtherCAT Stepper Drive User Manual
53
03
Homing virtual
input
R/W
UDIN
T
0~32767
0
--
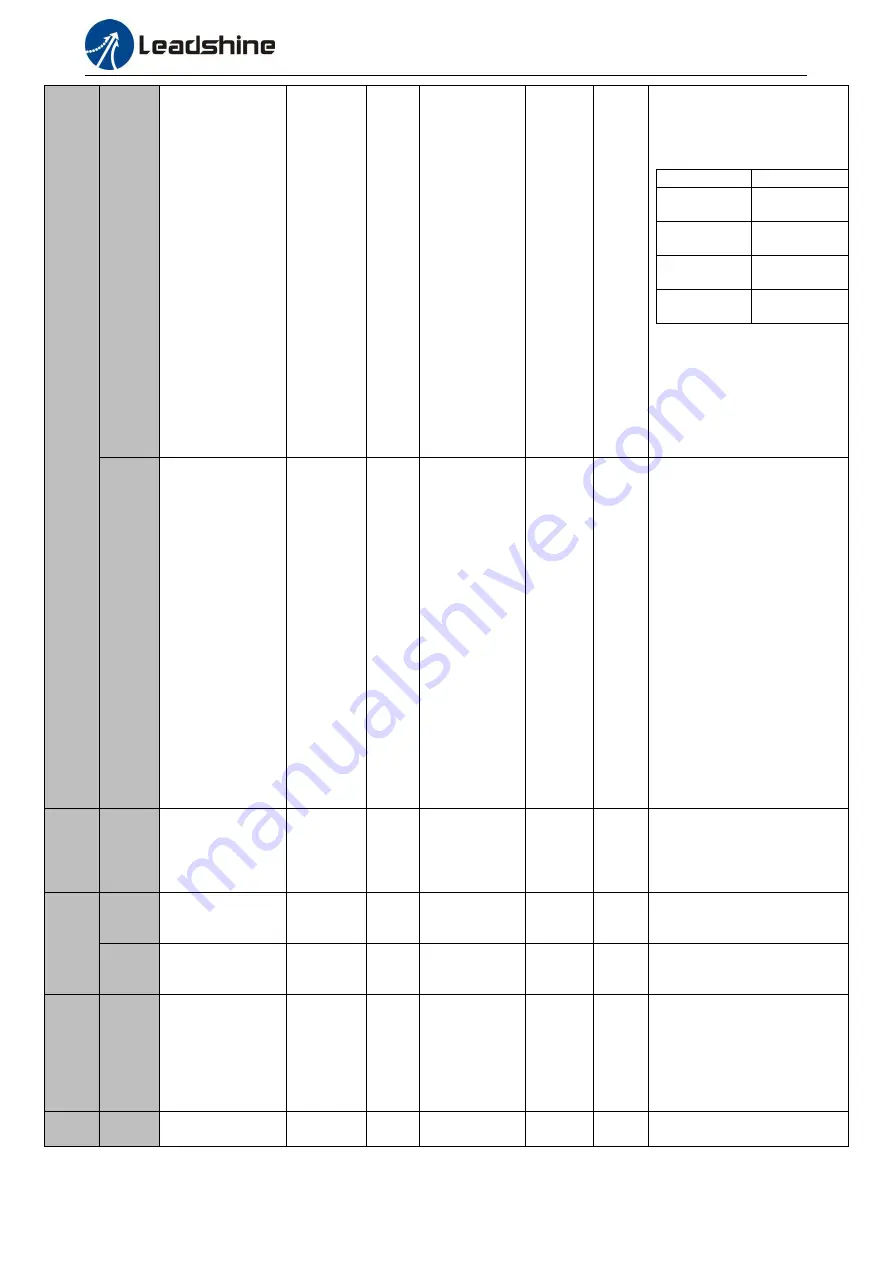
When 0x225C=4, activate
the virtual input function;
60FD
different
bits,
corresponding to different
virtual inputs;
Inputs
Bit of 60FD
Probe
signal 1
Bit 26=1
Origin
signal
Bit 2=1
Positive
limit
Bit 1=1
Negative
limit
Bit 0=1
For example: 0x225C=4 and
start
homing,
set
0x5012-03=4, Origin signal
input;
set
0x5012-03=2,
Positive limit input; set
0x5012-03=2, Negative limit
input
04
Homing setting
R/W
UINT
0~32767
5
--
Bit0=0: Homing protection
is not turned on;
Bit0=1: Homing protection
is turned on;
(Homing protection: when
start homing, If the limit
signal takes effect, bit0=0
means homing normally,
bit0=1 means stop homing
as limit protection )
Bit2=0: The value of current
position after in position =
0x607C;
Bit2=1: The value of 0x607C
is used as the motion offset,
and finally 0x6064 = 0;
Bit3=0:
0x6064=
0x607C
after in position;
Bit3=1: 0x6064 = 0x607C
after in position;
5015
05
Protocol setting
R/W
UINT
0~32767
255
--
Bit8 is used to select
whether the speed arrival
in PV mode comes from
bit0 of 0x5000-04 or bit8 of
0x5000-04.
5400
01
Minimum
synchronization
period
R/W
UINT
250~2000
250
us
--
02
Maximum
synchronization
period
R/W
UINT
250~20000
10000
us
--
5503
04
Special function
register
R/W
UINT
0~65535
2
--
Bit0 = 0: Asynchronous
mode, the host will track
0x607A-00 in real time;
Bit0=1:
Asynchronous
mode, the host does not
track
0x607A-00in
real
time.
603F
00
Error code
R
UINT
0-65535
0
--
Refer to chapter 5.2







































































