




















EM522-CAN Field bus Stepper Drive User Manual V1.0
25
SDO is a approach to access object dictionary. Compare with PDO which mapping fixed object dictionary, SDO can access
any specified object dictionary, with greater flexibility. But each of the SDO data packet contains only 4 process data. And
the SDO data interaction complement need 2 packets. So the transmission efficiency of SDO is lower than the PDO.
(2) Suitable object
Based on the transmission characteristics of SDO and PDO. PDO is suitable for real-time data transmission, Such as
receiving real-time position and speed commands, transmit real-time speed and position data, etc. SDO is suitable for
non-real-time data transmission (one-off operation). Such as modify a dictionary object.
(3) SDO transmission mode
There are 3 kinds of SDO transmission mode: Acceleration SDO transmission mode , Segmented transmission mode , Block
transmission mode. Under the condition of data transmission less than 4 bytes, can transmit SDO data without segment , this
kind of transmission mode is suitable for most of the objects. If the data is more than 4 bytes, must adopt segmented
transmission mode. For a long packet, it has low efficiency if adopting segmented transmission, but block transmission has a
better efficiency..
(4) The definitions of client and server
SDO Visitors are referred to as the client. A device whose object dictionary is accessed and shall provide the requested
service are referred to as server. The customer CAN packet and the server' response CAN packet always contains 8 bytes of
data (Although not all data bytes must be meaningful). A client's request must have a response from the server. Please refer to
chapter "2.7 service data object(SDO)" of
《
DM-CAN series CANopen technical instruction manual
》
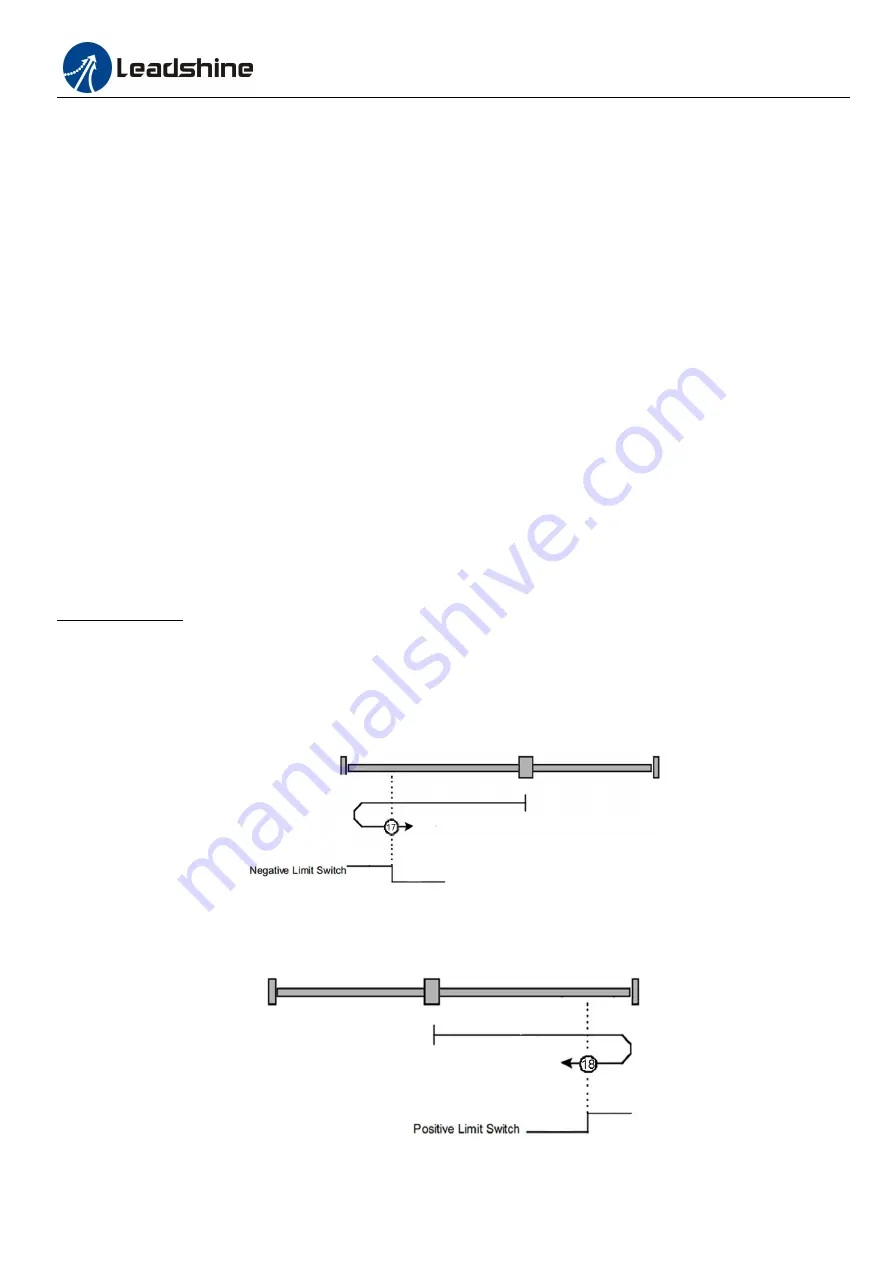
5.2.4 Homing mode
DM-CAN Series drives define various homing method according to the CANopen DS402 standard protocol. Because
EM522-CAN is open loop stepper drive, supported 17~30 homing mode currently. Specific motion trail of various homing
method is shown as below:
17:
18:
19~20:







































































