



























21
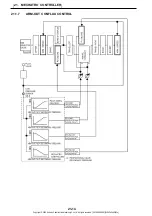
(1) During arm-in operation, arm operating pilot secondary pressure switches arm
spool and is input
to low pressure sensor on starting swing operation (or arm-in operation during swing operation),
and swing operation pilot secondary pressure switches swing spool and is input to low pressure
sensor.
(2) The output voltage of low pressure sensor is input to mechatro controller and the mechatro
controller processes pilot signal and outputs command according to the input voltage to P1 and P2
proportional valves, P1 and P2 unload pressure proportional valves, travel straight valve and
reverse proportional valve for arm 2 spool.
(3) Each proportional valve outputs pilot proportional valve secondary pressure according to the
command output by mechatro controller and changes P1 and P2 pump delivery rate and switches
P1 and P2 unload spool, travel straight spool, arm 2 spool.
(4) With original hydraulic pressure command, arm 1 spool and swing spool are switched and also
with the command by mechatro controller, P1 and P2 unload spools, travel straight spool and
arm 2 spool are switched enabling for two pump flow rates to be supplied to the arm cylinder
head side, and consequently the return oil on arm cylinder rod side is recirculated into arm
cylinder head side.
(5) ion by priority, and operated by the recirculated oil, making the operation with minimum speed
drop possible.
[
21. MECHATRO CONTROLLER
]
21-19
Copyright © 2015 Kobelco Construction Machinery Co.,Ltd. All rights reserved. [S5YN0046E03] [0109CsCshWbYs]