



























21
21.1.6
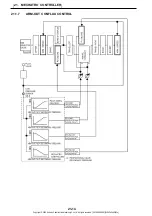
ARM-IN ANTI-CAVITATION CONTROL
(1) On starting arm-in operation, arm-in operating pilot secondary pressure switches arm 1 spool and
is input to low pressure sensor.
(2) The engine speed command output by accel potentiometer is input to mechatro controller.
(3) Low pressure sensor output voltage is input to mechatro controller, and the mechatro controller
processes pilot signal processing and outputs command according to the input voltage to P2 pump
proportional valve and P2 unload proportional valve.
(4) And also outputs command according to input pressure output by potentiometer to reverse
proportional valve for arm 2 spool.
(5) Each proportional valves output pilot secondary pressure according to each command output by
mechatro controller, and consequently since the reverse proportional valve for arm 2 spool is
controlled to spool stroke according to engine speed and changes recirculation rate to prevent the
cavitation from occurring even if pump delivery rate is low due to low engine speed.
[
21. MECHATRO CONTROLLER
]
21-13
Copyright © 2015 Kobelco Construction Machinery Co.,Ltd. All rights reserved. [S5YN0046E03] [0109CsCshWbYs]