



























21
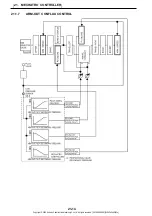
(1) On starting bucket digging (dump) operation, bucket digging operating pilot pressure switches
bucket spool and is input to low pressure sensor.
(2) The engine speed command output by accel potentiometer is input to mechatro controller.
(3) The output voltage of low pressure sensor is input to mechatro controller and the mechatro
controller processes pilot signal and outputs command according to the input voltage to P1 and P2
pump proportional valves, P1 and P2 unload proportional valves and travel straight proportional
valve.
(4) Each proportional valve outputs pilot proportional valve secondary pressure according to the
command output by mechatro controller and changes P1 and P2 pump delivery rate and switches
P1 and P2 unload valves and travel straight valve of control valve.
(5) The tandem passage is connected to P2 port because of the travel straight valve switched and P1
pump delivery oil confluxes P2 pump delivery oil because of P2 unload valve switched.
(6) ATT boost solenoid valve turns the solenoid valve on according to the engine speed, and outputs
secondary pressure, and actuate stroke limiter and then controls the stroke of bucket spool.
The control of spool stroke makes the prevention of cavitation possible even if engine speed is
low and pump delivery rate is low.
(7) When P1 pump pressure was raised at cylinder stroke end, etc. the solenoid valve is closed
according to the pump pressure, and when the pump pressure is high, the boost solenoid valve
does not work to control the stroke limit of bucket spool.
[
21. MECHATRO CONTROLLER
]
21-17
Copyright © 2015 Kobelco Construction Machinery Co.,Ltd. All rights reserved. [S5YN0046E03] [0109CsCshWbYs]