





























43
It will also be necessary to set the correct idle speed of the engine when the
throttle hold function is activated.
This idle value is located within the throttle hold function. This will allow the
engine to remain at idle when practicing autorotations.
7.
Revolution Mixing
It will be necessary to adjust the revolution mixing to properly
compensate for the torque of the engine during all flight conditions
(except autorotation).
Since there are many variables that can alter the value of the
revolution mixing (engine, blade pitch, fuel, etc.), it will be necessary
to fine tune this function during test flights.
The following values are shown only as a starting point toward achieving
proper compensation:
Flight Mode N Flight Mode 1
Flight Mode 2 (3D)
Up 35
Up 15
Up 15
Down 30
Down 10
Down 15
8. Gyro Gain Adjustment
It will be necessary to adjust the “gain” or compensation of the gyro to
create the correct amount of “holding power” necessary for a solid
neutral tail rotor. The intent of the gyro is to compensate for abrupt
movements, or wind direction changes, working in conjunction with
the revolution mixing function.
For hovering, it is recommended that you start with the gyro gain at
approximately 60°, and continue to increase slightly until the tail of the
helicopter “hunts”, then reduce the value slightly.
This same adjustment will also be necessary to achieve proper forward flight.
Generally, the gyro gain for forward flight will be approximately 10% - 20% less
than that of the established hover gain due to aerodynamic forces present in
forward flight.
If you are using a dual rate gyro, adjust the gain so that you are using “higher”
gain setting for hover, and the “lower” gain setting for forward flight.
It will also be necessary to confirm the direction that the gyro compensates when
the body of the helicopter is rotated.
To do this, turn the radio system on and suspend the helicopter by the main rotor
head. Next, move the rudder stick to the right and watch the direction that the tail
rotor servo arm travels. Now while watching the tail rotor servo arm, rotate the
body of the helicopter counter clockwise. The servo arm should move in the same
direction as when the rudder stick was moved to the left.
If the arm moves in the opposite direction, reverse the gyro and re-test.
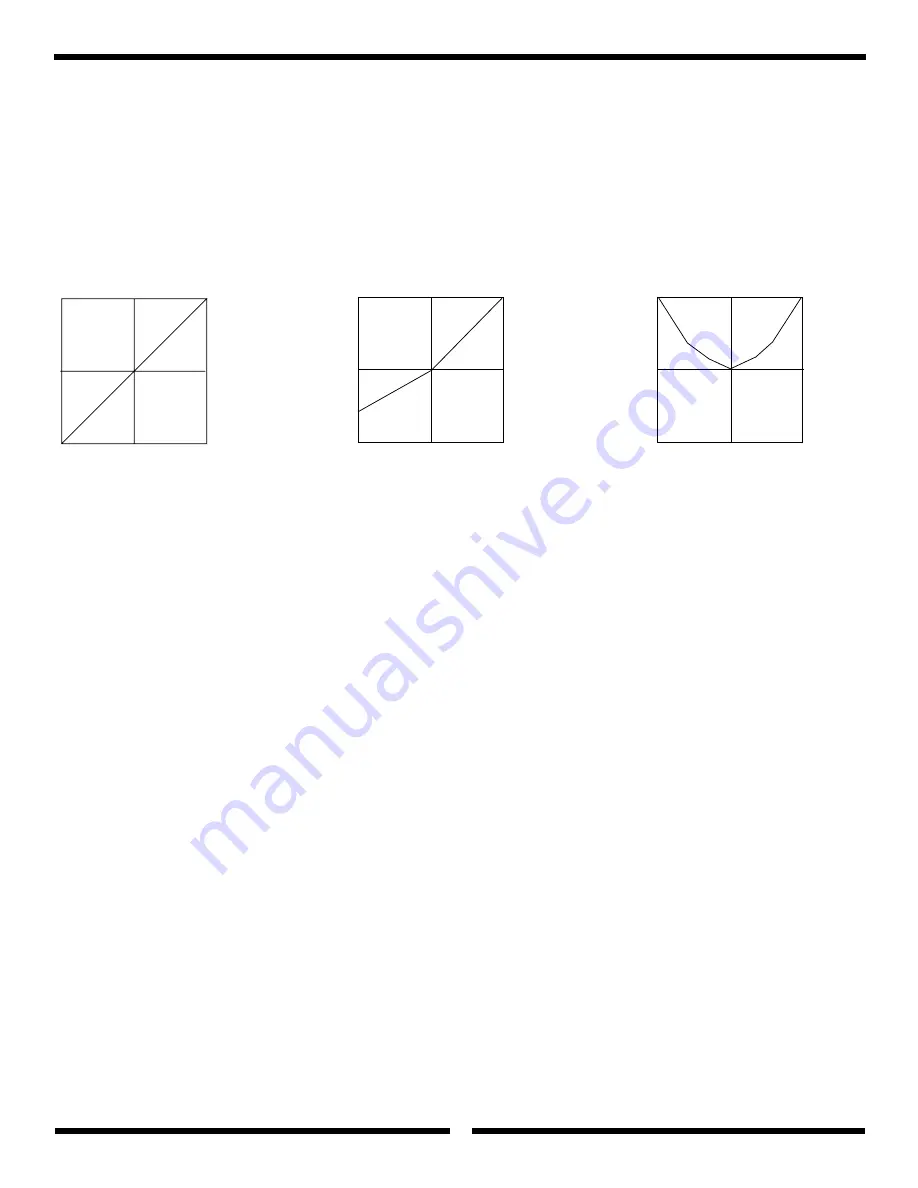
Note:
The throttle curve examples shown correspond to
the pitch curve examples show in Step 6A.
100%
50%
40%
0% Idle
Power Output
Hovering (Linear Curve)
Stick Position
Low
Half
High
Flight Mode
N
100%
50%
0% Idle
Power Output
Stunt & Aerobatic Flight
Stick Position
Low
Half
High
Flight Mode
1
100%
100%
50%
0% Idle
3D Flight (Optional)
Stick Position
Low
Half
High
Flight
Mode 2
Power Output
B. Throttle Curve Settings
Below are several examples of possible throttle curves during various
flight conditions.
Since throttle curves can vary greatly due to engine and muffler
combinations, it will be necessary to fine tune and adjust these values
during test flights to achieve a constant main rotor RPM.
Summary of Contents for ERGO .32
Page 66: ...Heli Division Revised 3 4 97...