User Manual
Appendix
EM1 Series AC Servo Motors
EM1-01-0-EN-2110-MA
Page
67
of
72
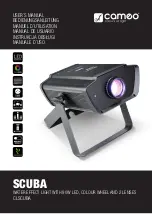
Motor calculation speed should be under motor continuous work range.
Ex: As bellowing T-N curve, 3.000 rpm is the continuous work range of motor speed.
13.1.5
Motor Torque Calculation
Transmission mechanism
Travelling torque calculation
Ball Screw
T
t
=
B
P
2π
B
eff
× (
μ
gW + F)
B
eff
∶
Ball screw efficiency (%)
g
∶
gravity (m/s
2
)
μ ∶
friction coefficient
Pulley & Belt
T
t
=
D
2P
eff
× (
μ
gW +
μ
gW
b
+ 2F
t
)
P
eff
∶
Pulley efficiency (%)
F
t
∶
Belt tension force (N)
W
b
∶
Belt weight (kg)
Rotary Table
T
t
=
μ
gW
T
+ n ×
μ
gW
W
T
∶
Rotary table weight (kg)
Acceleration torque
T
a
=
π
N
30t
a
× (J
L
+ J
r
) + T
f
Deceleration torque
T
a
=
π
N
30t
d
× (J
L
+ J
r
)
−
T
f
Equivalent torque
T
e
=
�
T
a
2
× t
a
+ T
f
2
× t
f
+ T
d
2
× t
d
tc
tc = ta + tf + td + ts ts
∶
stop time (sec)
0
5
10
15
20
0
1000
2000
3000
T (
Nm)
v (ms)
Peak work range
Continuous work range