


























Frankenrunner User Manual
Rev 1.0
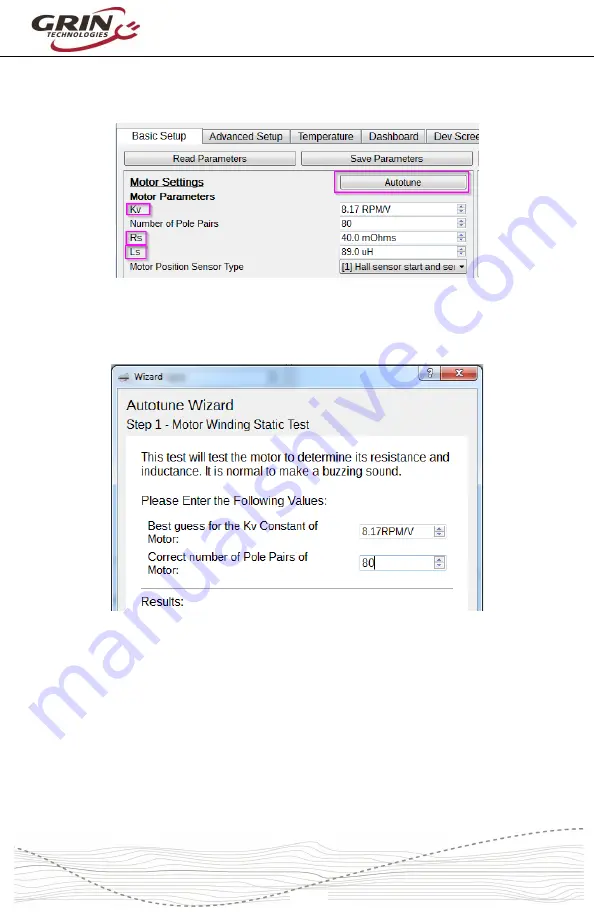
The Autotune routine can automatically detect motor parameters like the motor
speed constant (kV), resistance of one motor phase to neutral (Rs), and the
inductance of motor phase to neutral (Ls).
The start of the Autotune process asks for your best guess of the motor’s kV in
rpm/V, as well as the number of pole pairs in the motor. The firmware uses these
initial parameters for determining the test current frequency.
The Autotune routine will usually work fine even if your initial guess for the kV
value is incorrect. Most ebike hub motors fall within 7-12 rpm/V and an initial
guess of 10 will usually work.
The effective pole pairs is a count of how many electrical cycles corresponds to
one mechanical revolution of the motor and must be set correctly. The
Frankenrunner
needs this information to correlate it’s electrical output frequency
with the wheel speed. In a direct drive (DD) motor, it is the number of magnet
pairs in the rotor, while in a geared motor you need to multiply the magnet pairs
by its gear ratio. The following table lists the effective pole pairs for many
common motor series.
-10-







































































