



90VDC motor, or “J” for a 230VAC input and 180VDC motor.
2. Output Wiring
a. Connect the motor to the “A1” and “A2” terminals of the drive. Do not operate the control without connection to the motor.
b. Install a jumper for armature voltage feedback at position “I”.
3. Control Wiring
a. Speed potentiometer - For unidirectional rotation, connect a 5K, 1/4 watt speed potentiometer, with the wiper connected to
terminal “8” and CCW end to terminal “3”. Connect the other end to terminal “1”. For bi-directional rotation, connect the CCW
end to terminal “2”.
b. If an external speed reference signal is used, first set-up and adjust the system with a 5K potentiometer as a speed reference.
Connect the
external source only after satisfactory operation with a potentiometer, as any problem may then be directed toward
interfacing. The frequency of a pulse width modulated input signal must exceed 50Hz, otherwise damage may result.
An external signal of 0 to positive 6VDC is used for forward motion. A zero to -6VDC signal is required for reverse motion.
Wire common to terminal “3” and reference signal to terminal “8”.
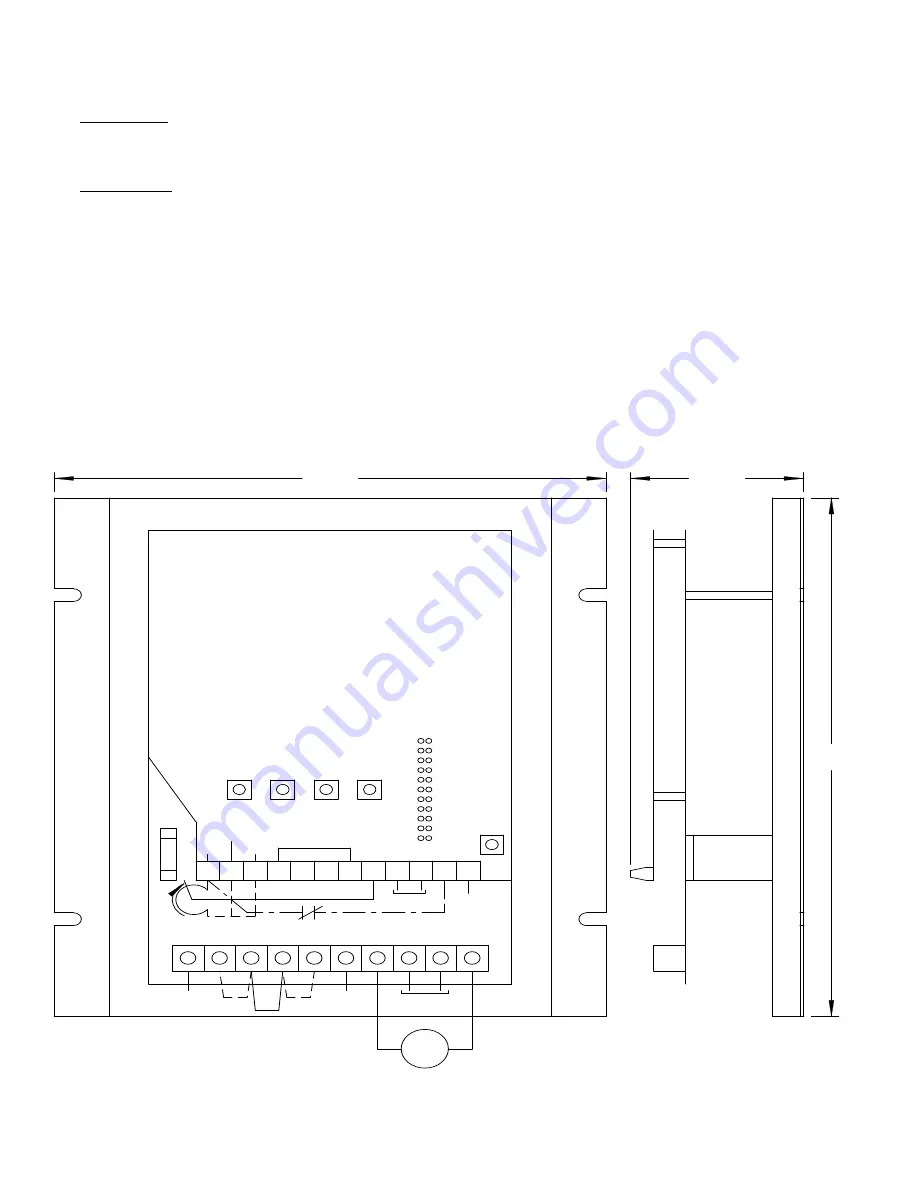
Wiring Diagram and Model 12M6-42000
DEAD
BAND
8.00"
12
11
10
9
8
7
6
5
4
3
2
1
L1
H1
H3
H2
H4
L2
A2
S1
S2
A1
COM
-6V
+6V
7.00"
3.50"
STABILITY
CURRENT
LIMIT
MAX
SPEED
IR
COMP
JUMPERS
K
J
I
H
G
F
E
D
C
B
A
FUSE
TACH FB
INHIBIT
AC LINE
120V
120V
240V
MOTOR
AC LINE
FACTORY
JUMPER
90V
180V
VOLT FB
TACH FB
115V
75V
50V
35V
22V
15V
10V







































































