





























126
MM300 MOTOR MANAGEMENT SYSTEM – COMMUNICATIONS GUIDE
FIELDBUS INTERFACE
CHAPTER 1: COMMUNICATIONS GUIDE
Commands are actioned on a change in Output data.
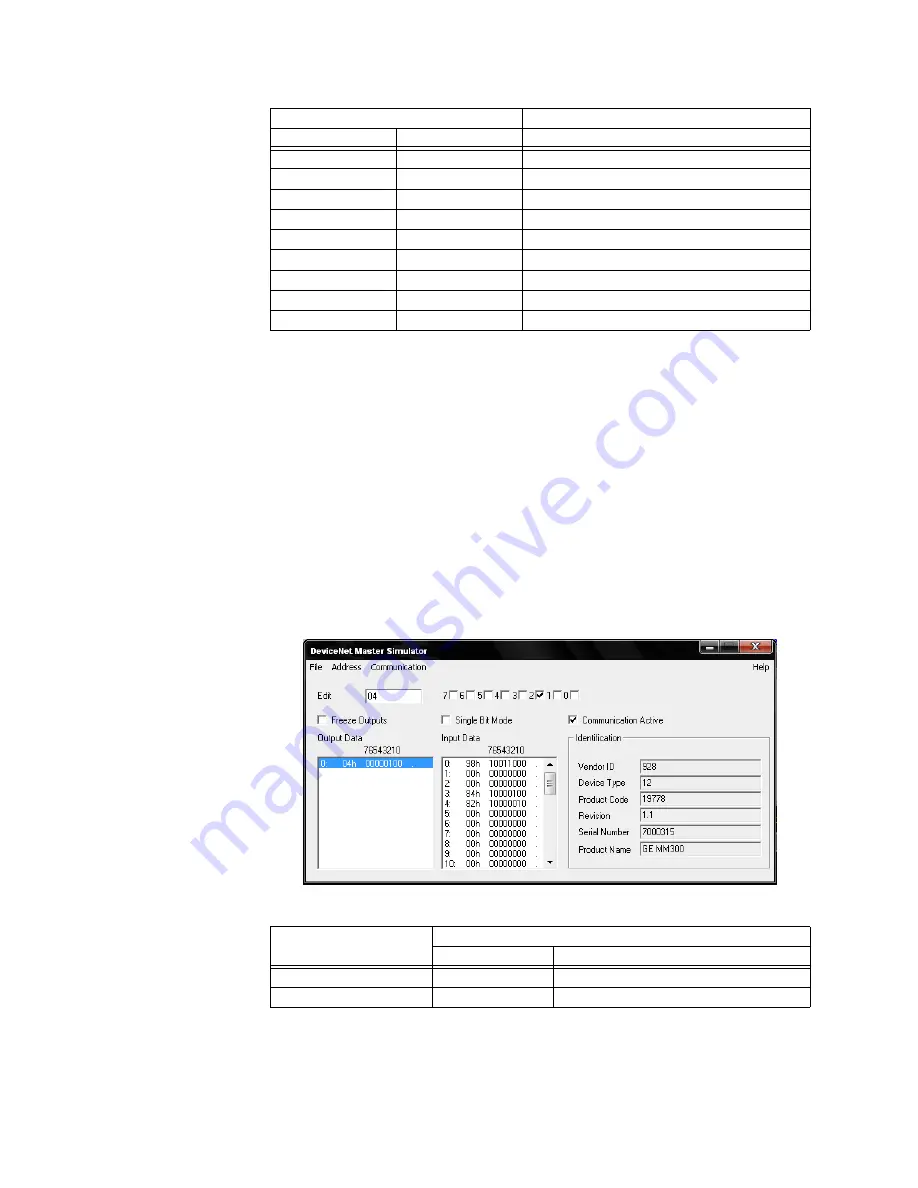
The example diagram below shows the MM300 polled I/O data read/written using a
DeviceNet master simulator. In this example, the "Start A" command has been sent via
Output data. In reading the Input data and interpreting the first byte value (98h) based on
the data format for that byte (FC129) the following is true:
•
Auto control is enabled
•
Contactor A is energized
•
Drive Available is true
In the event that there is a communication fault, and a pre-fault polled output command
caused the MM300 to start a motor, the motor will continue to run even after the
communication fault. To prevent this situation from occurring when remote
communication is used with the device the user must ensure that the 'Comm Failure Trip'
feature is configured. Refer to the MM300 Instruction manual, page 90 - Communications
Setpoints, under the
Home > Setpnts > Cfg > Comms
HMI page, for more information.
Figure 10: DeviceNet polled I/O data
Identity Object (Class
Code 01H)
Table 20: Identity Object, Class Code 01h, Services:
74
0x4A
Auto Mode
75
0x4B
Manual Mode
76
0x4C
Manual Inhibit
77
0x4D
Manual Restore
78
0x4E
Start Inhibit
79
0x4F
Start Restore
80
0x50
Trigger Waveform Capture
81
0x51
Start Datalog
82
0x52
Stop Datalog
VALUE DESCRIPTION
Dec
Hex
CODE
SERVICES AVAILABLE TO THIS OBJECT
NAME
DESCRIPTION
0x05
Reset
Reset the device to power up configuration
0x0E
Get_Attribute_Single Returns the contents of the given attribute