
























3. ADJUSTMENTS AND CHECKS
3-5
Heading correction at the motion sensor
Heading correction at the motion sensor is done with [Heading Adjust 2] on the [Oth-
ers] menu.
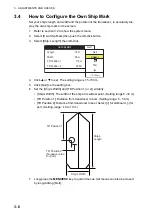
• If the control box is mounted on the hull unit, set the same heading correction as
entered for [Heading Adjust 1] (in [Others] menu).
• If the control box is mounted independent of the hull unit, set the angle measured
from the bow in the clockwise direction. The angle is 0° if the lid of the control box
is directed toward ship’s stern precisely.
• If the motion sensor is a GPS gyro, set 0°.
Summary of Contents for FSV-35
Page 22: ...1 HOW TO INSTALL THE SYSTEM 1 16 This page is intentionally left blank ...
Page 55: ...D 1 13 Sep 2011 Y NISHIYAMA ...
Page 56: ...D 2 13 Sep 2011 Y NISHIYAMA ...
Page 57: ...D 3 5 Nov 2010 Y NISHIYAMA ...
Page 58: ...D 4 Y Hatai ...
Page 59: ...23 Apr 2013 Y NISHIYAMA D 5 ...
Page 60: ...23 Apr 2013 Y NISHIYAMA D 6 ...
Page 61: ...D 7 13 Sep 2011 Y NISHIYAMA ...
Page 62: ...D 8 13 Sep 2011 Y NISHIYAMA ...
Page 63: ...13 Sep 2011 Y NISHIYAMA D 9 ...
Page 64: ...13 Sep 2011 Y NISHIYAMA D 10 ...
Page 65: ...13 Sep 2011 Y NISHIYAMA D 11 ...
Page 66: ...D 12 13 Sep 2011 Y NISHIYAMA ...