
















A
Technical appendix
42
Festo – GDCP-EXPT-KM-KOMP-EN – 1204a – English
A.1.3
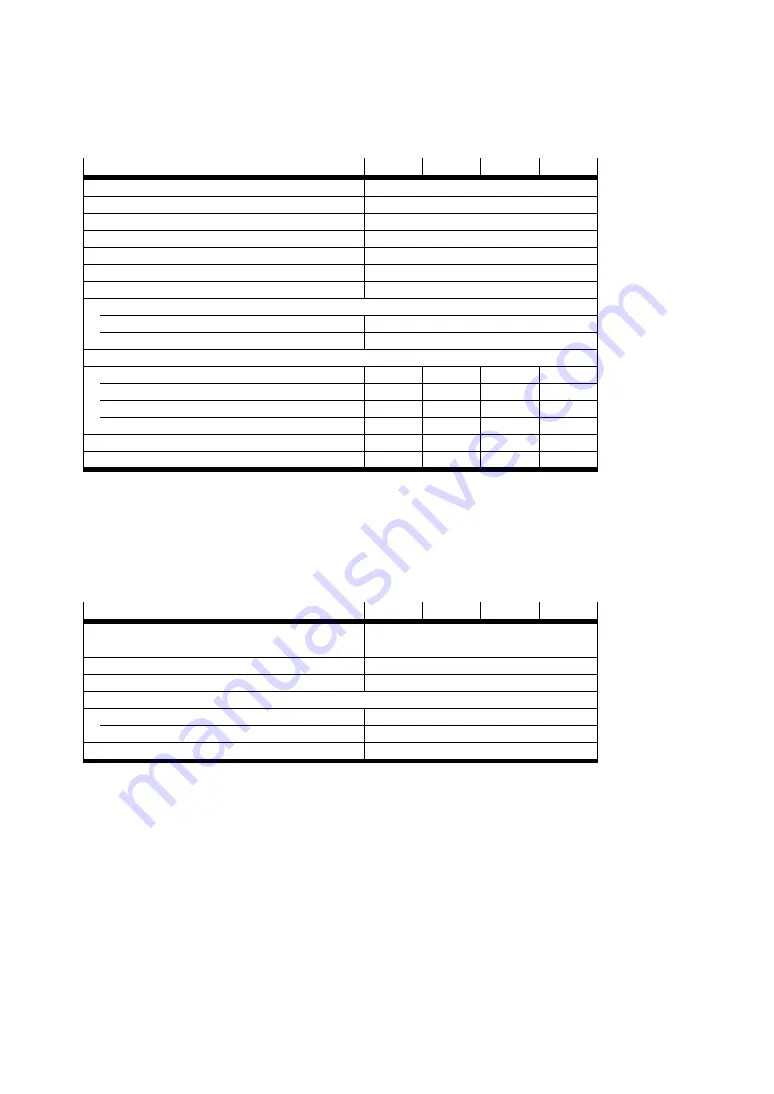
Dynamic
Size
45
70
95
120
Motor type
Servo motor
Max. acceleration
1)
[m/s
2
]
110
Max. speed
1)
[m/s]
7
Max. picking rate
1)5)
[picks/min]
150 (in 12 inch cycle)
Repetition accuracy
[mm]
± 0.1
Positioning accuracy
2)
[mm]
± 0.5
Track precision
3)
[mm]
± 0.5
Effective load
4)
With min. dynamic response
[kg]
5
With max. dynamic response
[kg]
1
Max. process force in Z direction
With working space
∅
[mm]
0
0
0
0
Process force in Z direction
[N]
1300
1000
1000
850
With working space
∅
[mm]
112.5
175
237.5
300
Process force in Z direction
[N]
1000
750
750
750
Max. frame strength horizontal
[N]
± 145
± 150
± 200
± 215
Max. frame strength vertical
[N]
± 250
± 290
± 325
± 475
1)
When used in conjunction with motor controller CMMP-AS-C5-3A and controller CMXR (multi-axis control).
2)
Only with calibrated system (order code S)
3)
Only with calibrated system (order code S) and a speed of
≤
0.3 m/s
4)
Sum of load mass and accessories attached to the front unit
5)
With a max. transient response of ± 0.5 mm
Tab. A.3
A.1.4
Operating and environmental conditions
Size
45
70
95
120
Operating medium
Compressed air in accordance with
ISO 8573-1:2010 [5:4:1]
Ambient temperature
[°C]
0 … +40
Storage temperature
[°C]
–10 … +60
Air humidity
–
[%]
5 … 95, non-condensing
T1 to T4
[%]
20 … 80, non-condensing
Duty cycle
[%]
100
Tab. A.4







































































