





























Basic Function Instruction
6-26
FUN 11
D
P
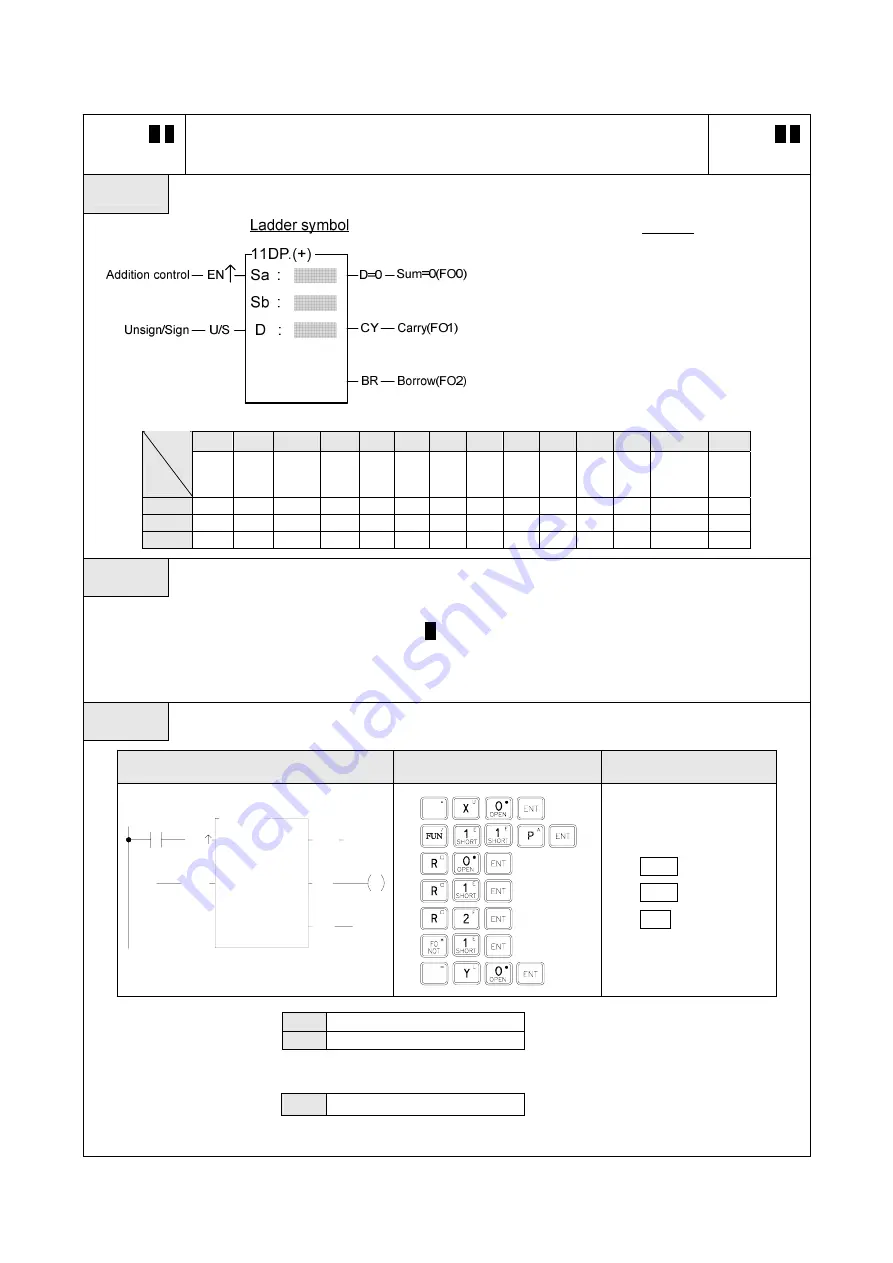
(+)
ADDITION
(Performs addition of the data specified at Sa and Sb and stores the result in D)
FUN 11
D
P
(+)
Symbol
Operand
Sa: Augend
Sb: Addend
D : Destination register to store the results
of the addition
Sa, Sb, D may combine with V, Z, P0~P9
to serve indirect addressing
WX
WY
WM
WS TMR CTR
HR
IR
OR
SR
ROR
DR
K
XR
Range
Ope-
rand
WX0
∣
WX240
WY0
∣
WY240
WM0
∣
WM1896
WS0
∣
WS984
T0
∣
T255
C0
∣
C255
R0
∣
R3839
R3840
∣
R3903
R3904
∣
R3967
R3968
∣
R4167
R5000
∣
R8071
D0
∣
D4095
16/32-bit
+/
−
number
V
、
Z
P0~P9
Sa
○
○
○
○
○
○
○
○
○
○
○
○
○
○
Sb
○
○
○
○
○
○
○
○
○
○
○
○
○
○
D
○
○
○
○
○
○
○
○
*
○
*
○
○
Description
●
Performs the addition of the data specified at Sa and Sb and writes the results to a specified register D
when the add control input "EN" =1 or "EN
↑
" (
D
instruction) from 0 to 1. If the result of addition is equal to
0 then set FO0 to 1. If carry occurs (the result exceeds 32767 or 2147483647) then set FO1 to 1. If borrow
occurs (adding negative numbers resulting in a sum less than -32768 or -2147483648), then set the FO2 to
1. All the FO statuses are retained until this instruction is executed again and overwritten by a new result.
Example
16-bit addition
Ladder Diagram
Key Operations
Mnemonic Codes
X0
EN
U/S
11P.(+)
Sa :
Sb :
D :
R
R
0
1
2
R
D=0
CY
BR
Y0
OUT
ORG
ORG X
0
FUN 11P
Sa
:
R
0
Sb
:
R
1
D
:
R
2
FO 1
OUT Y
0
Sa
R0 12345
Sb
R1 20425
R0
+
R1
=
32770
Ø
X0
=
D
R2 2
32768+2=32770
Y0
=
1 (carry 1 represents
+
32768)





















































