





























3 -6
FUN
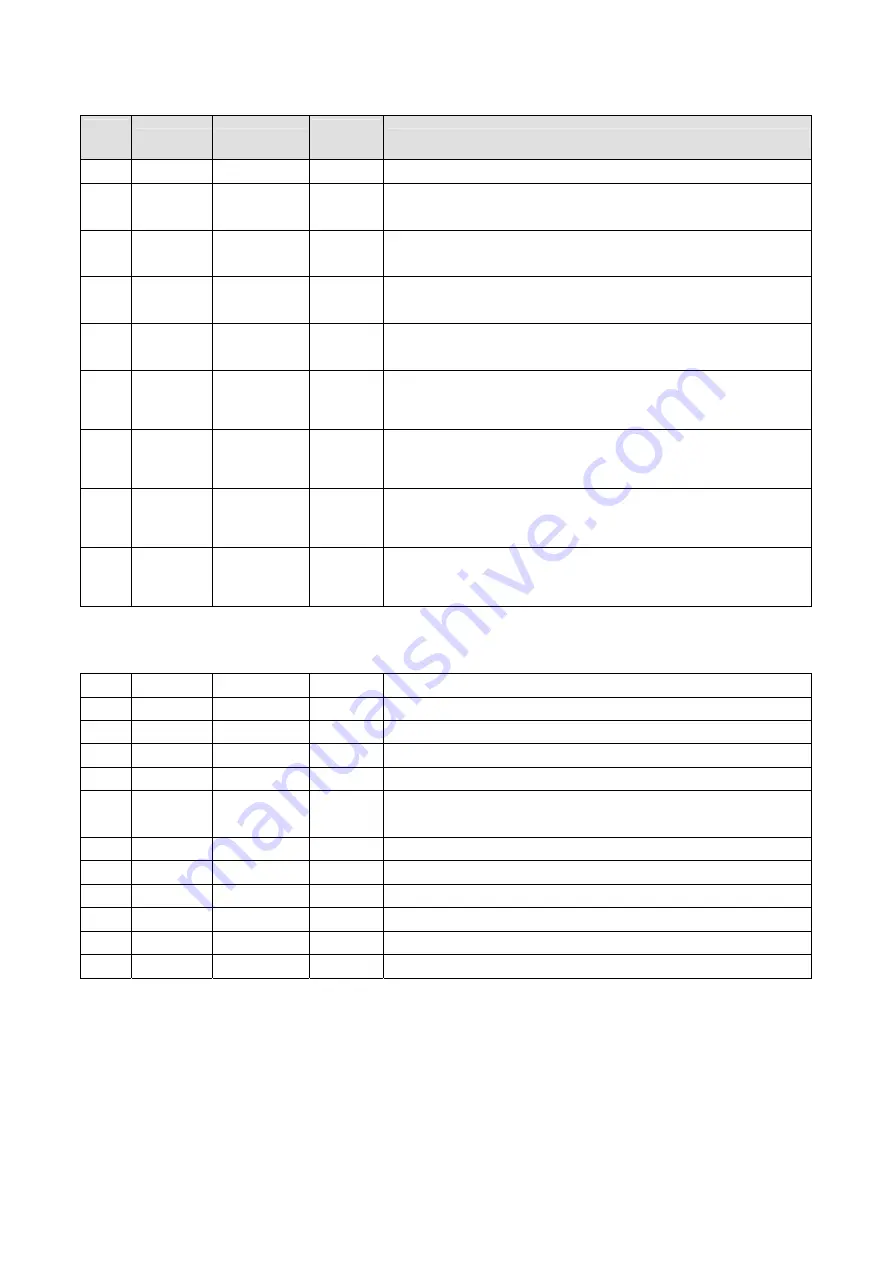
No.
Name
Operand
Derivative
instruction
Function descriptions
56
G
→
B
S,D
DP
Gray code to Binary conversion
57 DECOD S,Ns,N
L
,D P
Decode the binary data formed by N
L
bits starting from Ns bit within
S, and store the result in the register starting from D
58 ENCOD S,Ns,N
L
,D P
Encoding the N
L
bits starting from the Ns bit within S, and store the
result in D
59
→
7SG
S,N,D P
Convert the N+1 number of nibble data within S, into 7 segment
code, then store in D
60
→
ASC
S,D P
Write the constant string S (max. 12 alpha-numeric or symbols) into
the registers starting from D
61
→
SEC
S,D P
Convert the time data (hours, minutes, seconds) of the three
successive registers starting from S into seconds data then store to
D
62
→
HMS
S,D P
Convert the seconds data of S into time data (hours, minutes,
seconds) and store the data in the three successive registers starting
from D
63
→
HEX
S,N,D P
Convert the successive N ASCII data starting from S into
hexadecimal data and store them to D
64
→
ASC
Ⅱ
S,N,D P
Convert the successive N hexadecimal data starting from S into
ASCII codes and store them to D
Flow Control Instructions
0
MC
N
The start of master control loop
1
MCE
N
The end of master control loop
2
SKP
N
The start of skip loop
3
SKPE
N
The end of skip loop
END
End of Program
65 LBL
1
~
6
alphanumeric
Define the label with 1~6 alphanumeric characters
66
JMP
LBL
P
Jump to LBL label and continues the program execution
67
CALL
LBL
P
Call the sub-program begin with LBL label
68
RTS
Return to the calling main program from sub-program
69
RTI
Return to interrupted main program from sub-program
70
FOR
N
Define the starting point of the FOR Loop and the loop count N
71
NEXT
Define the end of FOR loop





















































