











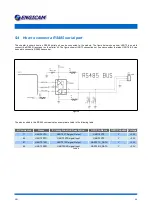














5.5 How to connect CAN BUS interfaces
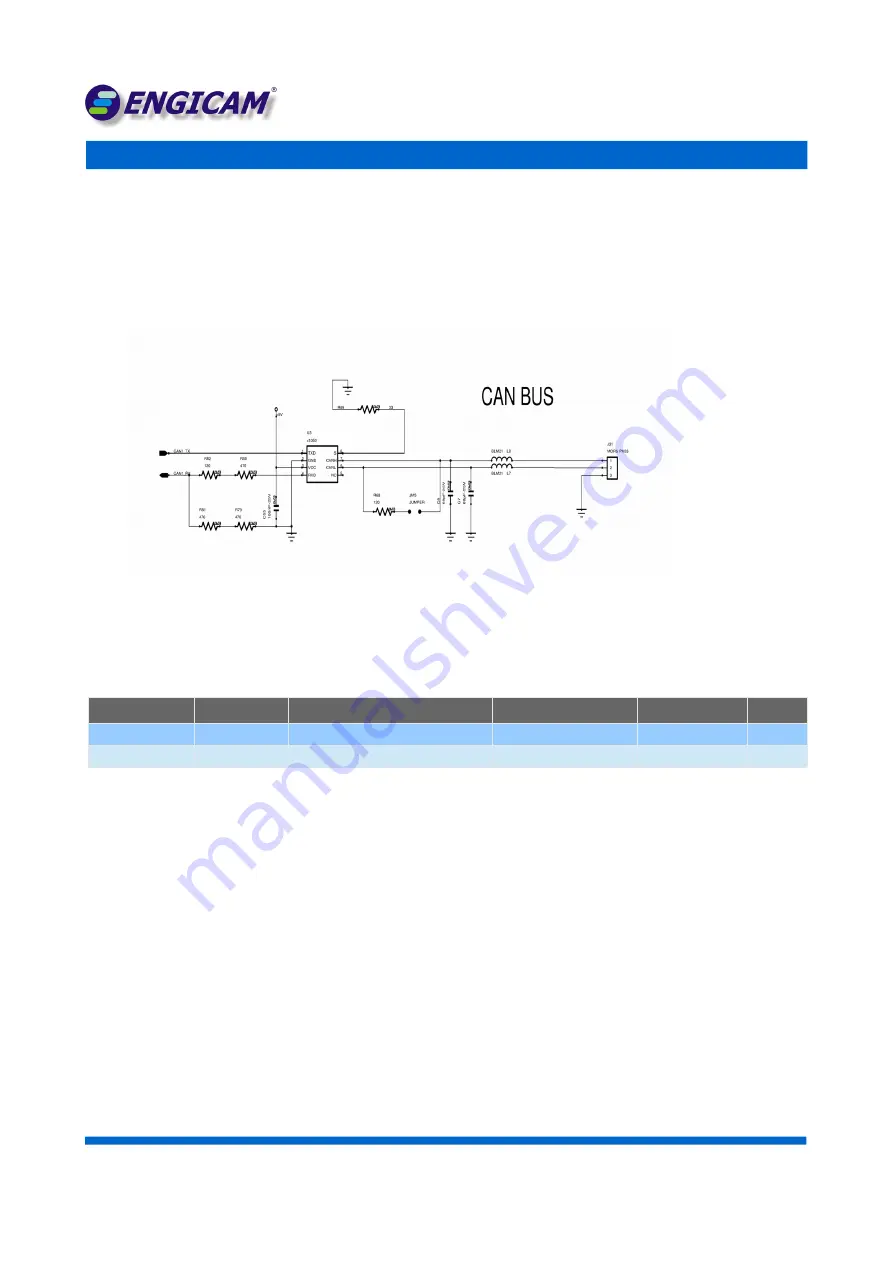
This chapter describes how CAN bus transceiver can be connected to a module. The figure below shows how CAN bus1 and 2 are
connected in the evaluation board. Both CAN buses have been implemented.
Figure 6
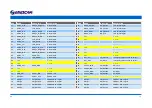
The following table describes the pins' numbering in the main connector involved in the CAN interface
A Connector
Name
Primary Function Description
CPU Pin Name
GPIO Capable
Voltage
88
CAN1_TX
CAN 1 transmit signal
UART3_CTS
Y
+3,3V
90
CAN1_RX
CAN 1 receive signal
UART3_RTS
Y
+3,3V
Table 10
The Jumpers JM1, is used to close the load of the CAN Bus to 120 Ω
D N :
2 5
































































