





























6 Viewers
User Manual
114
6.2.3.
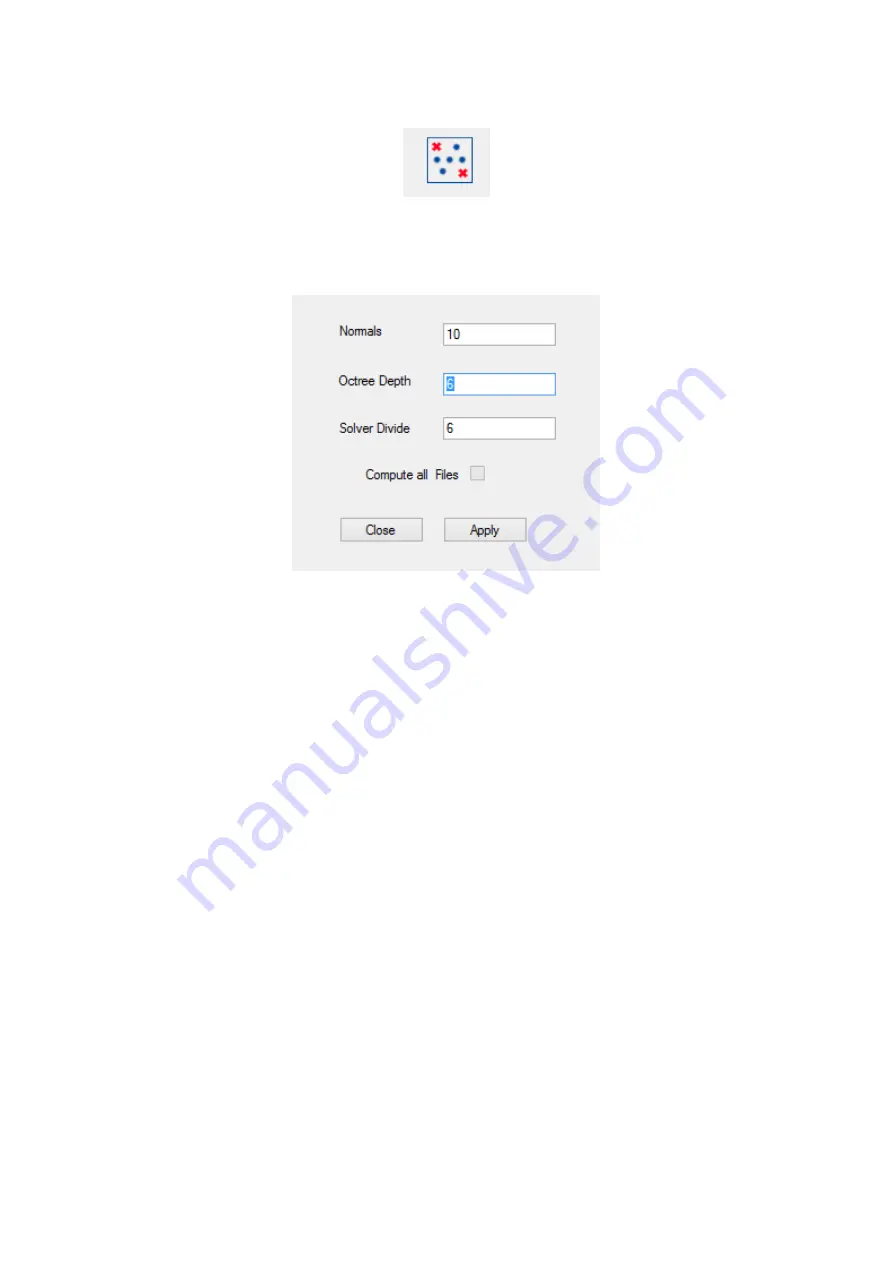
Clean Noise
This filter removes noise from the point cloud using automatically-generated mesh. The
parameters are shown below:
“
Normals
” Field: C
alculates the normals of the point cloud depending on the
neighbours. A high value for this parameter improves results but slows down
processing. A value between 10 and 1000 is recommended.
“
Octree Depth
”
and
“
Solver Divide
” fields: T
hese two fields are recommended to be set
high in the event that the point cloud which is going to be filtered is relatively clean
(values between 10 and 12 are recommended for both fields). If the point cloud is not
optimised and has a lot of noise, small values are recommended (6 for both fields).
To apply this filter to an entire project (.aln) the option “Compute All Files,” must be
marked; otherwise, only the selected model will be filtered.
Observe the images displayed below to check results. The first image is without
filtering while in the second one the noise has been removed.
Summary of Contents for eyesmap
Page 1: ...USER MANUAL EYESMAP Version 1 0 Revision A June 2015...
Page 9: ...2 Technical Specifications In this chapter we shall see Tablet Cameras Depth Sensor GPS IMU 2...
Page 118: ...7 Practical cases User Manual 118 Medium Object...
Page 119: ...7 Practical cases User Manual 119 Small Object...
Page 120: ...7 Practical cases User Manual 120 7 1 1 2 Photo Development and Management...
Page 121: ...7 Practical cases User Manual 121 Small Objects...
Page 126: ...7 Practical cases User Manual 126 9 Orientation Points...
Page 129: ...7 Practical cases User Manual 129 Click on Confirm...
Page 130: ...7 Practical cases User Manual 130 The distance of the stereoTarget will be saved Click on Next...
Page 134: ...7 Practical cases User Manual 134...
Page 191: ...7 Practical cases User Manual 191...





















































