





























27
Manual Home Function
Another method for changing the
position reference is the ‘DREF’
command (Define Reference). The axis
should first be jogged to the desired
home position. This command is
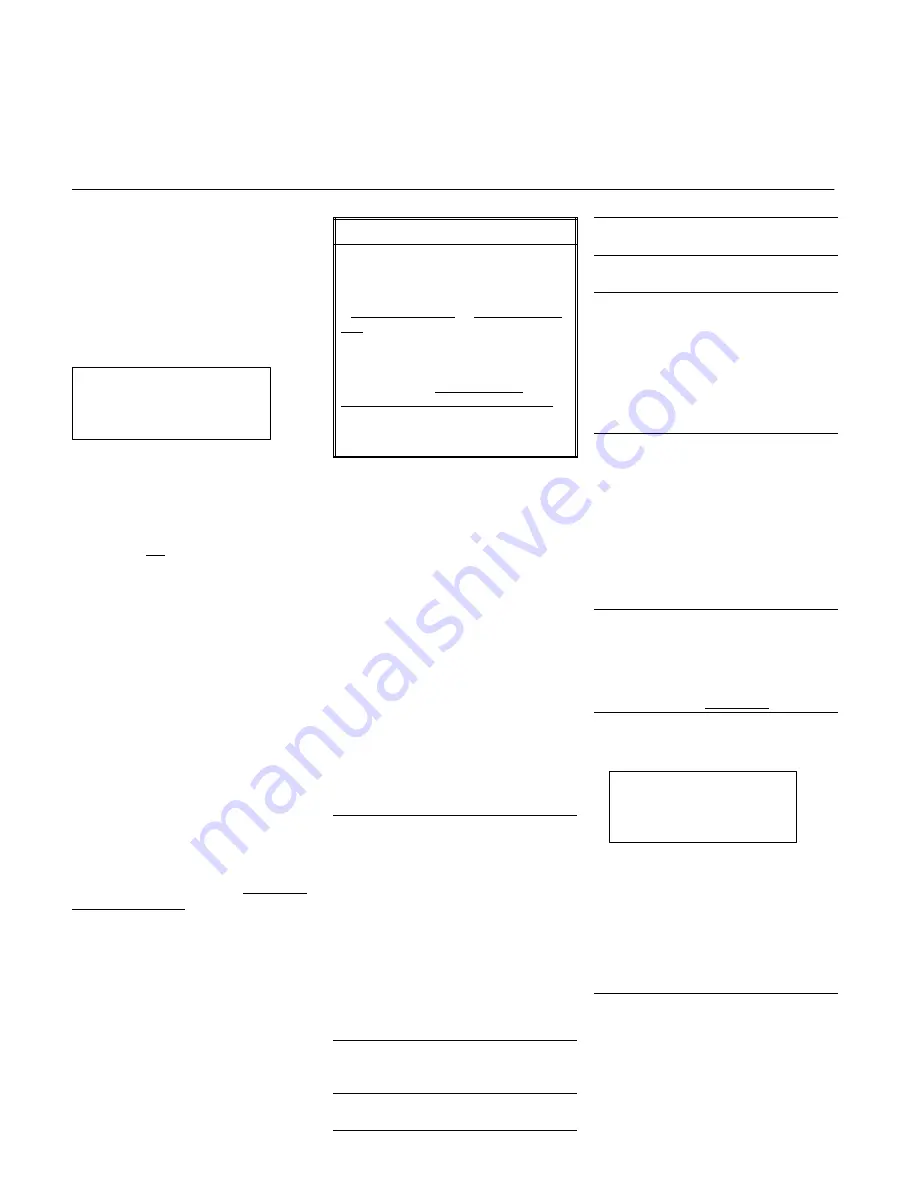
available in the RUN mode on the Home
screen:
HOME AXIS [ 1]
QUIT
F1
AXIS
F2
DREF
F3
HOME
F4
Press the F3 key. The position
reference will now be set to the home
position value as set in the CFG mode.
For incremental feedback transducers
such as encoders, the ‘DREF’ position
reference is not saved. When the unit is
shut down and then powered back ‘On’,
you must jog to a desired position and
then do ‘DREF’ to re-reference the
position.
The ‘DREF’ function can be done
automatically in programs or any time by
use of a digital input. The internal
function ‘Set Position Reference’ can be
assigned to one of the front panel input
addresses (page ##). Refer to
Programming Reference Manual to learn
how to use this function in programs.
Use of the ‘Set Position Reference’
function can be used as a Home;
however, the axis must first be physically
located at the desired home position.
Axis Limits
Axis plus (+) and minus (–) travel limits
should be installed because damage or
improper operation can occur from fully
extended or retracted actuator
operation.
CAUTION
Use of Limit+ and Limit– travel limits,
depend on a correctly operating
SMC20 controller.
If machine damage or personal injury
can result from overtravel, it is
recommended that back up limit
switches located outside the LIMIT+,
LIMIT– switches be installed and
wired such that actuator power
(electric or hydraulic) IS REMOVED
when the limit switch is tripped. The
machine must then be physically reset
to an acceptable position.
When either limit switch is turned
‘On’, the axis will decelerate (at
current deceleration value) to zero
velocity and hold position. The axis
must then be jogged off the limit
switch in the opposite direction
before normal operation can
resume.
Set-Up Checklist and
Operation Test
It is recommended that the following
checklist and operation test be
performed before entering or
running programs. This test verifies
that the system wiring is correct and
that the controller operates
correctly.
1.
AS A MINIMUM, the following
axis parameters should be set to
reasonable values for your sys-
tem.
– Engineering units (feedback
sensor counts per engineering
units)
– Maximum move velocity
– Maximum Acceleration/
Deceleration
– Home Parameters (only if home
sequence is used]
– Maximum position error
2.
Axis gains are set as a minimum,
a Kp Gain should be set to 1000
– 5000 to obtain motion.
3.
Emergency stop provisions
connected and tested.
4.
Limit+ and Limit– connected if
being used.
5.
Jog motion has been operated
and verified.
Table 3-3. Set-Up Checklist
Operational Test – The following
test will verify that the controller is
wired correctly and is operating.
Basic positioning will be
accomplished.
Performance of this test assumes that:
Jog motion has been operated and
verified.
D
Installation checklist is completed.
D
Set-Up checklist is completed
D
Set-Up checklist is completed.
D
Jog motion for each axis has been
tested.
D
All parameters have been SAVED.
D
Operator has read this manual.
1.
Power ‘On’ – go to RUN mode.
Go to Jog screen and move axis
to approximate center position
(inside limits or minimum and
maximum travel). Record the
axis position .
2.
Push Quit–F1 key and then
POS–F3 key to reach the
following screen:
MOVE ANS[ 1]
↑
QUIT
F1
TO AXIS
F2
ABSOLUTE POS MOVE
F3
[0.0000 ]
↓
<EDT
F4
Push <EDT-F4 key and enter in a
position value to move to – which
is inside the travel range. The
value should be different than the
one recorded above. When the
Save-F3 key is pressed, the
above screen will return (with the
position value that was entered).





















































