





























23
CMA USER MANUAL
E-VLMB-TT005-E April 2019 www.eaton.com
CMA User Manual
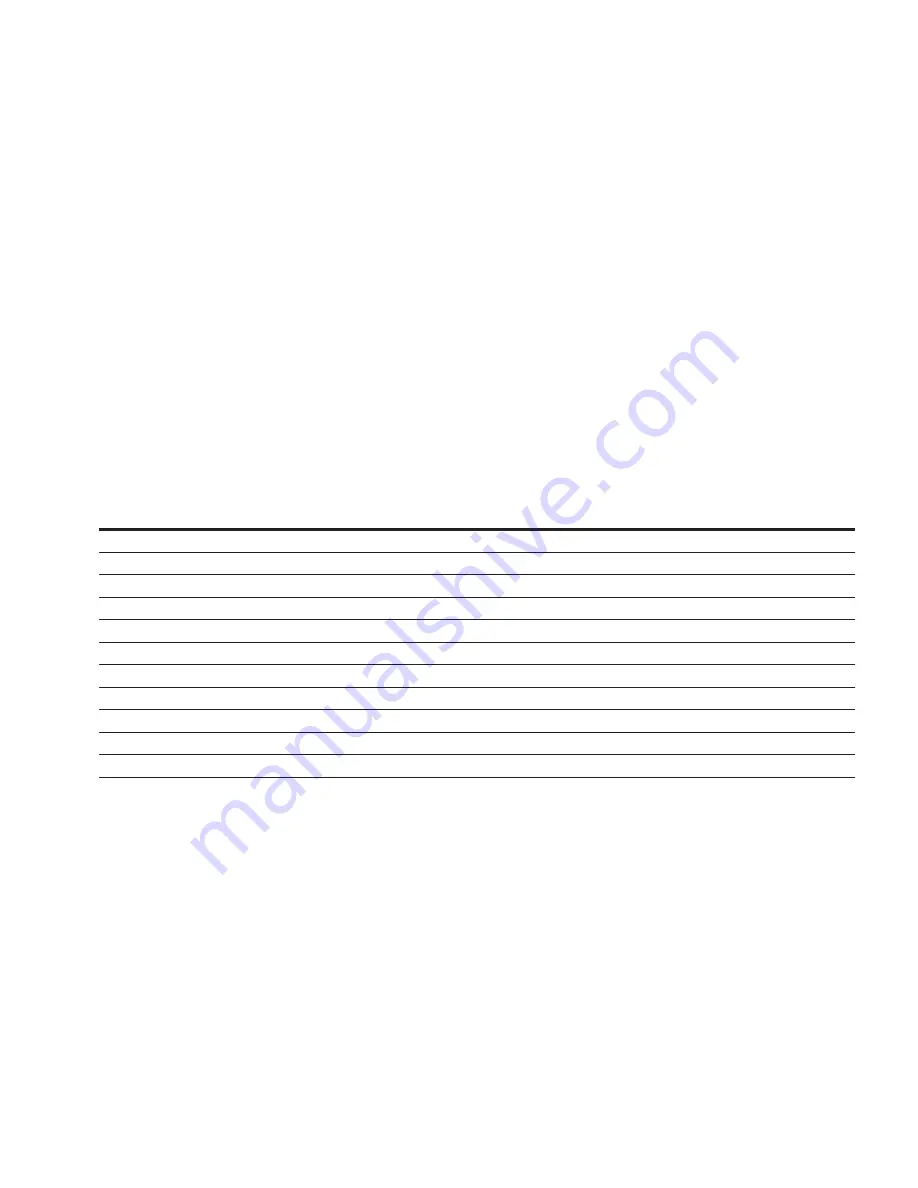
Table 20 . Applicable parameters
Object dictionary name
J1939 section index
CANOpen object
Suggested default value
Units
Pressure setpoint for IFC - Passive
617
0x4269
1000
cbar
Pressure setpoint for IFC – Overrunning
618
0x426A
1000
cbar
IFC Press Kp x256
926
0x439E
6273
IFC Press Ki x256
927
0x439F
30
IFC Press Shaper K x2^16
619
0x426B
1224
IFC Press Shaper Positive Rate Limit
620
0x426C
1473823
cbar/1.5ms * 2^16
IFC Press Shaper Negative Rate Limit
621
0x426D
-1473823
cbar/1.5ms * 2^16
Load Damp Filter Passive
626
0x426E
27139
Load Damp Filter Overrunning
627
0x426F
27139
Load Damp Gain Passive
928
0x43A0
50
Load Damp Gain Overrunning
929
0x43A1
50
6.2.2.3 Pressure damped flow control
There is a feature included in IFC (and also in Float and
Single-Spool Flow Control) that can help reduce oscillations.
For high inertia services, the valve can react much faster
than the service can move. For example, when starting
to lower a heavy boom, the valve can open to meter flow
out, but the service accelerates slowly. This can cause
the pressure to drain out of the cylinder, which makes the
service accelerate faster. The valve compensates to correct,
and this can cause an oscillatory behavior between the
valve and the service. By observing the pressure in the
cylinder, this damping term can be used to counteract these
oscillations. The damping term is characterized by a gain, a
filter setting, and the volume of the service. Turning up the
gain increases the damping effect, and the filter should be
set to be faster than the frequency that the boom oscillates
at (20 Hz is the default value). Separate parameters are
provided for Passive and Overrunning loads. The filter is
tuned using the method described in the Digital Filter
Coefficient section.
In order to use the IFC mode, select IFC in the Twin Spool
Control Mode Selection. The basic setup for IFC is just to
set the desired pressure for each work port.
An added feature worth noting in IFC is Anti-Fallback. When
the valve receives a non-zero flow demand for a passive
load, the valve shall remain in a zero flow state with the
spools maintained in a closed position until the supply
pressure is greater than the load pressure (i.e. upstream
port pressure). Once supply pressure is greater than the
load pressure, the full flow demand will be applied. This
check is also applied when the flow demand changes
directions. The purpose of this feature is to prevent the load
from falling backwards at the beginning of a command.
In IFC, one side of the actuator will be in pressure control.
The IFC pressure controller has PI gains and a trajectory
shaper that can be used to tune the response of the back
pressure controller. The shaper is tuned the same way as
the shaper in the port pressure controller.





















































