















Fixed Addressing Mode
Fixed addressing mode allows for any pair of CAN message identifiers to be used for I/O module
communication.
In this mode, the I/O module relies on the RX_ID, TX_ID, and Frame parameters for communication with
the function block. Use the PLUS+1
®
Service Tool to set the proper values to match the function block and
to set the AddrMode.
Volatile Parameters
Once initial communication is established, all volatile parameter configuration messages are sent to the
I/O module.
Non-Volatile Parameters
After volatile parameters are configured, the function block sends a request for the configuration CRC to
the I/O module.
If this number matches the locally calculated value, then the configurations stored on the I/O module
match those set in the function block. If the numbers do not match, then all configuration commands are
sent and the CRC is requested again.
You can use the PLUS+1
®
Service Tool to access all non-volatile parameters on the I/O module.
Timing Configurations
Timing for messages to and from the I/O module is established after all other configurations are sent.
CAN Bus Load
Adjust the average amount of message transmissions on the CAN bus to allow for bursts and other
increased message transmission situations.
Any CAN bus has a maximum message transmission capacity. So, to allow for situations that can cause
increases in messages, minimize the CAN bus load.
The CAN bus load is the average amount of message transmission on a CAN bus. Use the PLUS+1
®
CG150
USB/CAN gateway and CANKing software to view CAN bus loads.
PLUS+1
®
I/O modules communicate with their associated controllers over a CAN bus. System developers
can adjust I/O module RepTime and TimeOut parameters to manage CAN bus loading. Increasing these
times reduces the CAN bus load. Decreasing these times increases CAN bus load.
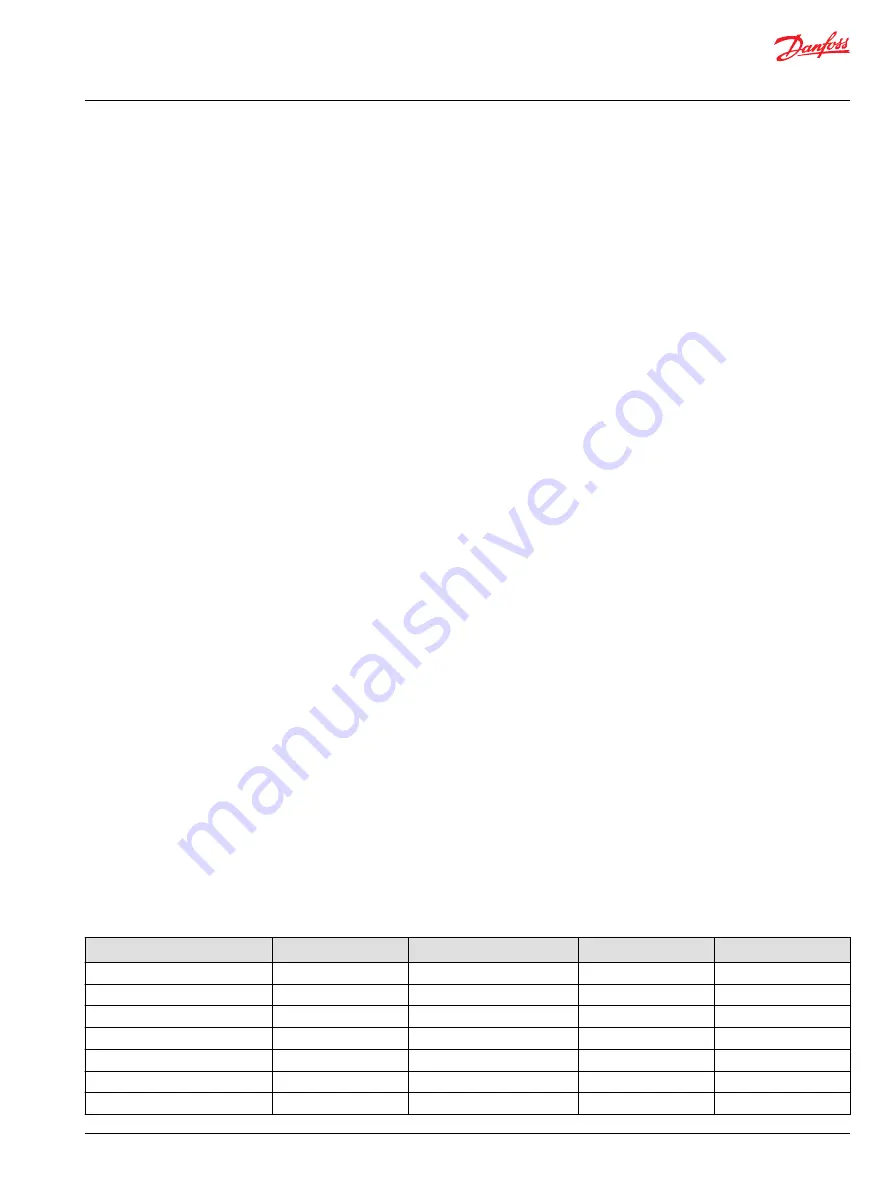
CAN Message Identifiers
The function block uses the following message identifiers to enable communication between the
controller and the I/O module.
I/O Module CAN Message Identifiers
CAN Shield Voltage [mV]
N1
KWP2000 Node
Tx ID
Rx ID
0 – 299
0
0
0x180
0x300
300 – 599
1
8
0x188
0x308
600 – 899
2
16
0x190
0x310
900 – 1199
3
24
0x198
0x318
1200 – 1499
4
32
0x1A0
0x320
1500 – 1799
5
40
0x1A8
0x328
1800 – 2099
6
48
0x1B0
0x330
User Manual
PLUS+1® Compliant OX024-x10 Function Block
OX024-x10 Function Block
©
Danfoss | July 2018
11063395 | AQ00000104en-US0101 | 11







































































