





























42
2.8.7
J12
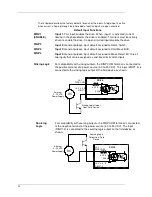
J12, Option Card General Purpose I/O is a 15-Position High Density D
subminiature male connector.
1
6
1 1
5
1 0
1 5
1
1
F!'
(,
8) D
F!'
(,
8) A
F!'!
(,
8)#
F!'
A $(
F!'
(,
8)"
F!'
,
E
D H8
F!'
(,
8)
F!' !
( = A
F!'
(,
8)
F!'
( = '
F!'#
D:H '
F!'
( =9A
F!'"
D:H A
F!'
( =9'
F!'
(,
8) '
General Purpose
Inputs DINP 6-9
J12-2, 3, 4, 5 Common
Input Terminal
J12-1
The general purpose inputs are a bank of four inputs that share a
common terminal, DINP COM, on J12-1. The inputs operate over a
wide input voltage range of ± 4.0 to ± 30 volts. General purpose
inputs are compatible with either sourcing or sinking currents to
provide maximum flexibility for interfacing to field wiring.
OUT3
J12-6,7
This output pair provides a general purpose output configurable by
software to perform one of a variety of functions.
DINP 10: High Speed
Input
J12-8, 9
General Purpose Input with uncommitted opto isolator design. Same
as DINP 5 on Base Unit. Can be tied to common rail (may require a
resistor – see DINP 5 on page 35.
J12 –10
+5 VDC
This terminal provides a 5 VDC output to power an external
command encoder, if necessary. The load current should not exceed
200 mA.
J12-11
I/O RTN
This terminal is the return connection for the 5 VDC supply. An inner
feedback cable shield can be connected to this point. Outer shields
should connect to the shell which is PE.
Summary of Contents for S20630
Page 6: ......
Page 15: ...9 3 1 6 E 6 E 6 E 6 E 6 E 6 E 6 E 6 E...
Page 19: ...13 1 6 11 General 3H 3 3H 5 E 3 3 5J...
Page 94: ......







































































