





















Comau Robotics Product Instruction
8
SAFETY REQUIREMENTS FOR E.DO GRIPPER USE
1.3 During the use
Minimum safety requirements to be followed during the Robot use are given below:
–
the e.DO Gripper can be used by children (age > 14 years old) and by persons with
reduced physical, sensory or mental capabilities, or with insufficient experience
and knowledge, provided that they are under the supervision of an adequately
trained and informed adult, responsible for the safe use of the Robot itself. Children
must not play with the equipment, they must not perform cleaning and routine
maintenance operations.
–
during motion, do not insert body parts (fingers, hands, arms, etc.) between the
gripper fingers or gears of the e.DO Gripper in order to avoid possible pinching;
–
handle exclusively objects of conformation such as to guarantee a good grip on the
part of e.DO Gripper;
–
during the use, provide a sufficiently large free space around the Robot equipped
with the e.DO Gripper (greater than the operating range of the Robot with e.DO
Gripper, see
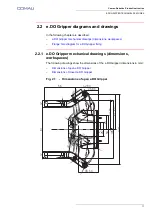
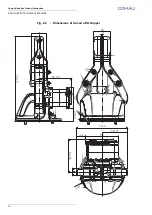
par. 2.2 e.DO Gripper diagrams and drawings on page 11
and
Fig. 1.7 - Robot workspace in 6 axes configuration on page 16
workspace in 4 axes configuration on page 17
on the “
requirements and technical specifications
” handbook) in order to avoid any Robot
impacts that could cause pinching or crushing;
–
do not suspend or fix objects (or similar) to the Robot structure or to the e.DO
Gripper during the operation;
–
in case of
Integration of perimeter protective guards for the use of the e.DO Gripper
, periodically check the correct functioning of the guard
interlocking devices, connected to the “Fence” input and of an additional
emergency button connected to the “E-Stop” input on the apposite J8 connector on
Robot base; activate the devices and verify the stop of the Robot.
Do not use the e.DO Gripper working with wet or damp hands or feet.
In the event of fault or malfunctions, do not independently carry out dismantling or repair
attempts on the Robot or on the e.DO Gripper; contact the Comau Service Centre, as
indicated in the “
Certifications, Service, Warranty
” supplied with the Robot
itself. See also the following address: edo.cloud/support-and-contacts/.
Summary of Contents for e.DO
Page 27: ......