Zero UAV (Beijing) Intelligent Technology Co., Ltd. 23
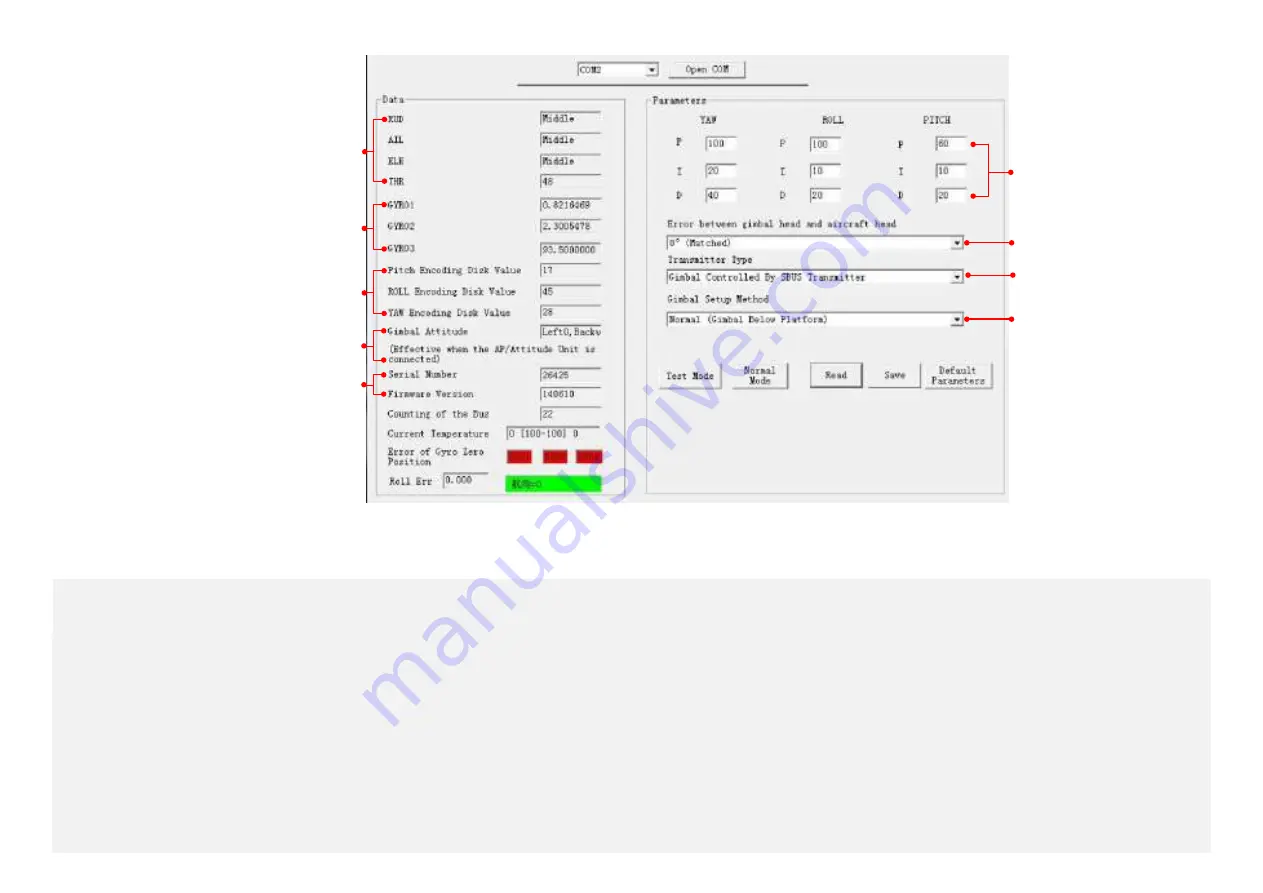
Stick positions on RC transmitter: when the sticks are
released these values should reflect the neutral stick
position. If not gimbal should be restarted after the
transmitter is switched on (the gimbal will automatically
record the neutral positions).
This is the angle rate of the pitch, roll and yaw axes.
The range is between 0.01 and 0.1 when it is static. If
the gimbal moves and the value does not change, then
the gimbal bus is damaged or not connected properly.
The position reached by the motors on each axis, the
value is an integer between 0-8191. The value will not
change when the gimbal is static. If the gimbal moves
the value should increase or decrease. If not, the
gimbal bus is damaged or not connected properly.
The position when the gimbal is connected via
PTZ1/PTZ2/PTZ3. When the flight controller is tilted by
hand this value should change to the corresponding
posture angle. If not, the gimbal bus is damaged or not
connected properly.
The serial number and the firmware version number of
the gimbal controller.
The PID values for YAW, ROLL
and PTICH have been preset.
No further adjustment is needed.
There are 4 choices for the
deviation angle between the
forward direction of the gimbal
and the head of the aircraft: the
default value is 0 (matched).
There are 2 transmitter types.
The default value is shown
(Gimbal Controlled by SBUS
Transmitter).
There are 2 gimbal installation
styles shown. The default value
is Normal (Gimbal Below
Platform).
Figure 12 Data and parameters
NOTE
:
After modifying data or parameters, “Save” should be clicked several times to activate the settings. Now click “Read” to
check the settings are correct.
If the angle of deviation between the gimbal and aircraft head direction has been modified "the settings should be
activated as follows: