





























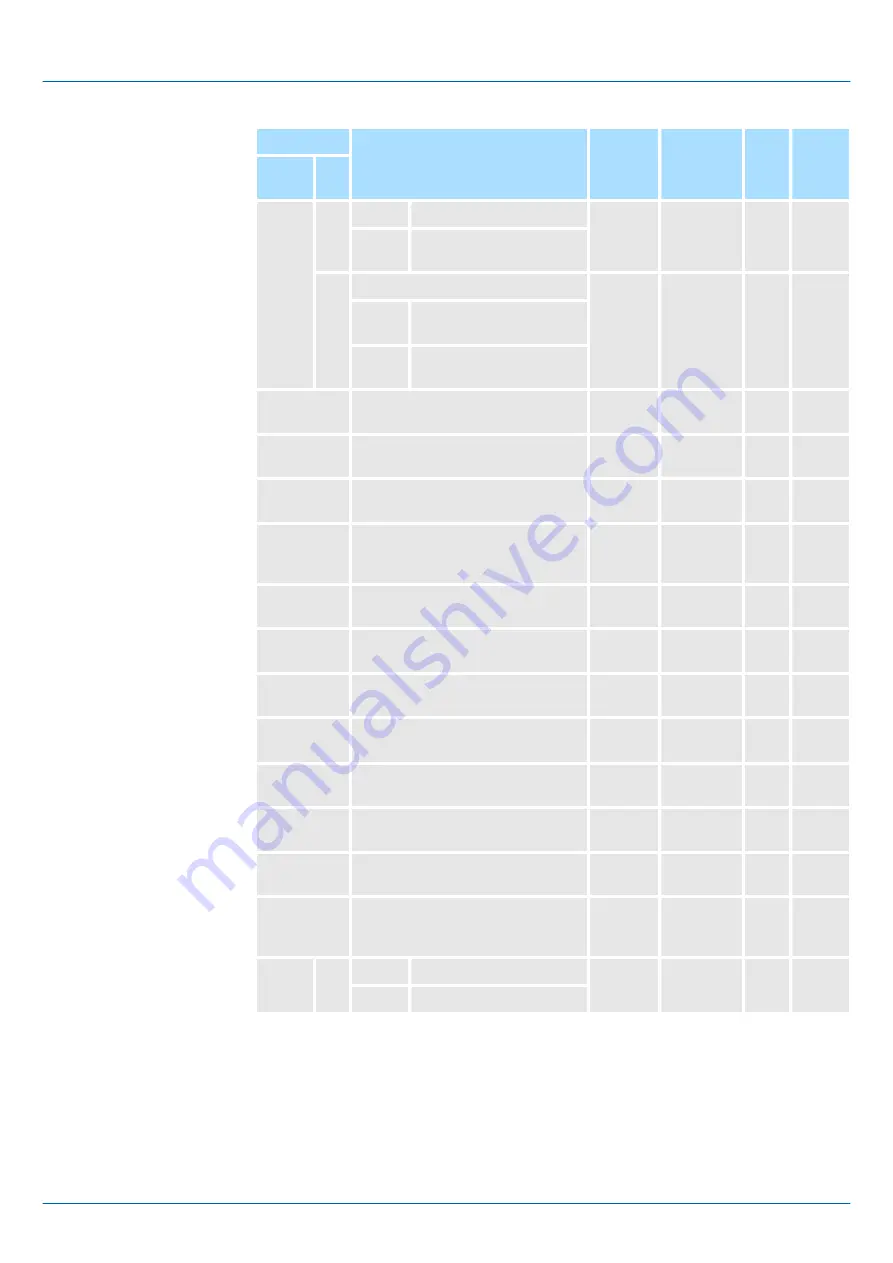
Parameter
Function
Default
Value
Required
value
Cat.
When
ena-
bled
No.
Dig
.
0
Both positions are same
1
The positions are dif-
ferent
3
Hall Sensor Signal Inversion
0
*1
O
After
restart
0
Does not inverse the sig-
nals (Pos-Logic)
1
Inverses the signals
(Neg-Logic)
Pn212
Number of Encoder Output
Pulses
2048
*1
O
After
restart
Pn481
Polarity Detection Speed Loop
Gain [0.1 Hz]
400
*1
O
Imme-
diately
Pn482
Polarity Detection Speed Loop
Integral Time Constant [0.01 ms]
3000
*1
O
Imme-
diately
Pn486
Polarity Detection Reference
Acceleration/ Deceleration Time
[ms]
25
*1
O
Imme-
diately
Pn487
Polarity Detection Constant
Speed Time [ms]
0
*1
O
Imme-
diately
Pn488
Polarity Detection Reference
Waiting Time [ms]
100
*1
O
Imme-
diately
Pn490
Polarity Detection Load Level [%]
100
*1
O
Imme-
diately
Pn493
Polarity Detection Command
Speed [min
-1
]
50
*1
O
Imme-
diately
Pn494
Polarity Detection Range [0.001
rev]
0.250
*1
O
Imme-
diately
Pn495
Polarity Detection Confirmation
Force Reference [%]
100
*1
O
Imme-
diately
Pn498
Polarity Detection Allowable Error
Range [deg.]
10
*1
O
Imme-
diately
Pn587
Polarity Detection Execution
Selection for Absolute Linear
Encoder
-
-
-
Imme-
diately
0
0
Does not detect polarity
0
*1
O
Imme-
diately
1
Detects polarity
*1 these settings are dependent on the applications
*2 in case of Pn080.0=1 (Disables hall sensor), the setting is not required
Sigma-5 and Sigma-7 Series SERVOPACKs
SERVOPACK Set-up
SERVOPACK for Semi-closed Loop Control with Rotary Motor
| | Feedback Option Module Type 3 - Manual version C - Revision 0 | en |
78







































































