



















7 Troubleshooting
YASKAWA Europe
TOEP_C710606_97A - AC Drive A1000 IP54READY - Quick Start Guide
EN 31
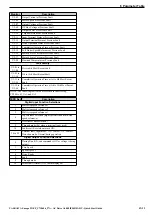
Output Phase Loss
Output cable is disconnected or the motor winding is
damaged.
Loose wires at the drive output.
Motor is too small (less than 5% of drive current).
• Check the motor wiring.
• Make sure all terminal screws in the drive and motor
are properly tightened.
• Check the motor and drive capacity.
Overcurrent
Short circuit or ground fault on the drive output side
The load is too heavy.
The accel./decel. times are too short.
Wrong motor data or V/f pattern settings.
A magnetic contactor was switched at the output.
• Check the output wiring and the motor for short
circuits or broken insulation. Replace the broken
parts.
• Check the machine for damages (gears, etc.) and
repair any broken parts.
• Check the drive parameter settings.
• Check the output contactor sequence.
Heatsink Overheat
Surrounding temperature is too high.
The cooling fan has stopped.
The heatsink is dirty.
The airflow to the heatsink is restricted.
• Check the surrounding temperature and install
cooling devices if necessary.
• Check the drive cooling fan.
• Clean the heatsink.
• Check the airflow around the heatsink.
Motor Overload
The motor load is too heavy.
The motor is operated at low speed with heavy load.
Cycle times of accel./ decel. are too short.
Incorrect motor rated current has been set.
• Reduce the motor load.
• Use a motor with external cooling and set the correct
motor in parameter L1-01
• Check the sequence.
• Check the rated current setting.
Drive Overload
The load is too heavy.
The drive capacity is too small.
Too much torque at low speed.
• Check the load.
• Make sure that the drive is big enough to handle the
load.
• The overload capability is reduced at low speeds.
Reduce the load or increase the drive size.
DC Overvoltage
DC bus voltage rose too high.
The deceleration time is too short.
Stall prevention is disabled.
Braking chopper / resistor broken.
Unstable motor control in OLV.
Too high input voltage.
• Increase the deceleration time.
• Enable stall prevention by parameter
L3-04.
• Make sure the braking resistor and braking chopper
are working correctly.
• Check motor parameter settings and adjust torque and
slip compensation as needed.
• Make sure that the power supply voltage meets the
drives specifications.
Input Phase Loss
Input voltage drop or phase imbalance.
One of the input phase is lost.
Loose wires at the drive input.
• Check the power supply.
• Make sure that all cables are properly fixed to the
correct terminals.
Braking Transistor
Fault
The internal braking transistor is broken.
• Cycle the power supply.
• Replace the drive if the fault reoccurs.
Thermistor
Disconnect
The motor thermistor is not connected properly.
Check the wiring for the thermistor.
DC Undervoltage
The voltage in the DC bus fell below the undervoltage
detection level (L2-05).
The power supply failed or one input phase has been
lost.
The power supply is too weak.
• Check the power supply.
• Make sure, that the power supply is strong enough.
Controller
Undervoltage
The drives controller power supply voltage is too low.
• Cycle power to the drive. Check if the fault reoccurs.
• Replace the drive if the fault continues to occur.
DC Charge Circuit
Fault
The charge circuit for the DC bus is broken.
• Cycle power to the drive. Check if the fault reoccurs.
• Replace the drive if the fault reoccurs.
Digital Operator AL
FLT
Cause
Corrective Action
PF
oC
oH or oH1
oL1
oL2
ov
LF
rr
THo
Uv1
Uv2
Uv3







































































