





























Rover User Manual Version 3.0
16
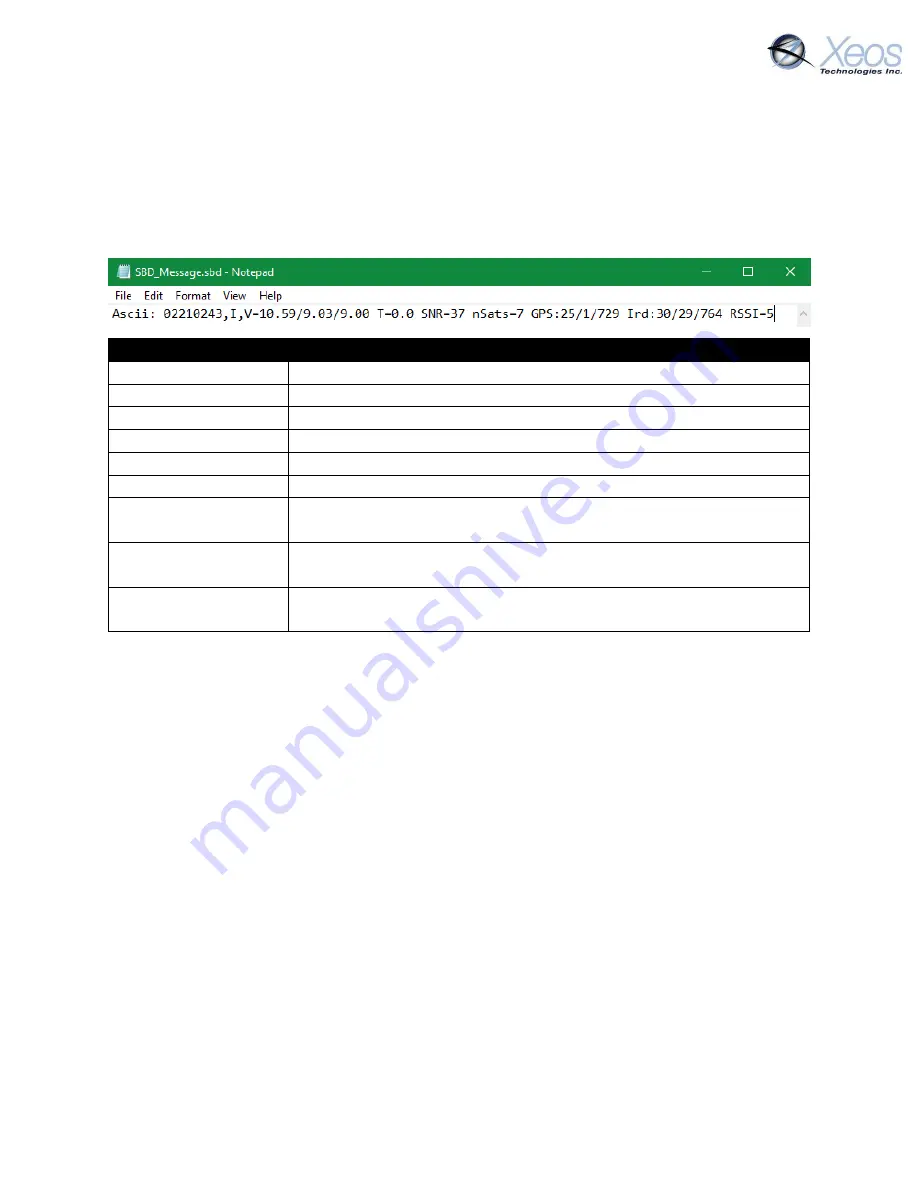
Information Message (Type I)
In situations where the device fails a GPS session through low SNR or other factor, the follow-up
Iridium session will send a synopsis of the latest statistics from the device. This message will
always be in ASCII format regardless of message format settings and approximately 80 bytes.
This message can be prompted using $sysinf
Information Readout
02210243
Timestamp in UTC (Month/Day/Hour)
I
Type of message (Information)
V=10.59/9.03/9.00
Battery voltages unloaded/after Iridium session/after GPS session
T=0.0
Most recent temperature measurement, not used in Rover
SNR=37
MaxSNR (Signal-to-Noise ratio) of the last GPS attempt
nSats=7
Number of connected satellites during last GPS attempt
GPS:25/1/729
Quantity of good fixes since powerup, fails/Quantity of failed fixes/
Seconds total GPS has been powered on since power-up
Ird:30/29/764
Quantity of Iridium messages/Quantity of Iridium sessions/ Seconds
total on time for Iridium
RSSI=5
Value reported back from the modem. Always a number
between z
ero and five;
five being the strongest signal.
Orientation Change Message
The Rover will automatically switch back and forth between the two antenna arrays as the tilt
sensor detects shifts in position.
The tilt axis defaults to the horizontal axis; if the Rover is standing upright, it will operate using
the custom dual antenna at the top of the enclosure. If the Rover crosses the horizontal axis, i.e.
orientated upside down, it will switch to using the dual antenna located at the bottom of the
enclosure.
When the Rover is inverted, it enters Timer 2 and lets the user know it has inverted by sending a
Stats message. The Rover does not recognize it has inverted until the device attempts a GPS
session and requires the use of the antenna opposite of the one it used during the last session.
Each time an orientation change occurs, the device increments the Orientation Change Count at
the top of the Stats message. This occurs both when the device goes inverted, and when it is
restored to an upright position.
The ROBY does not use Timer 2, but will transmit this message on power-up since it is deployed
in the inverted orientation.







































































