





























Force mode
also supports applying certain torques around predefined axes. The robot arm
attempts to accelerate along that axis, if no obstacles are met in an axis where a non-zero force
is set. Although an axis is selected to be compliant, the robot program still tries to move the
robot along that axis. However, force control assures that the robot arm still approaches the
specified force.
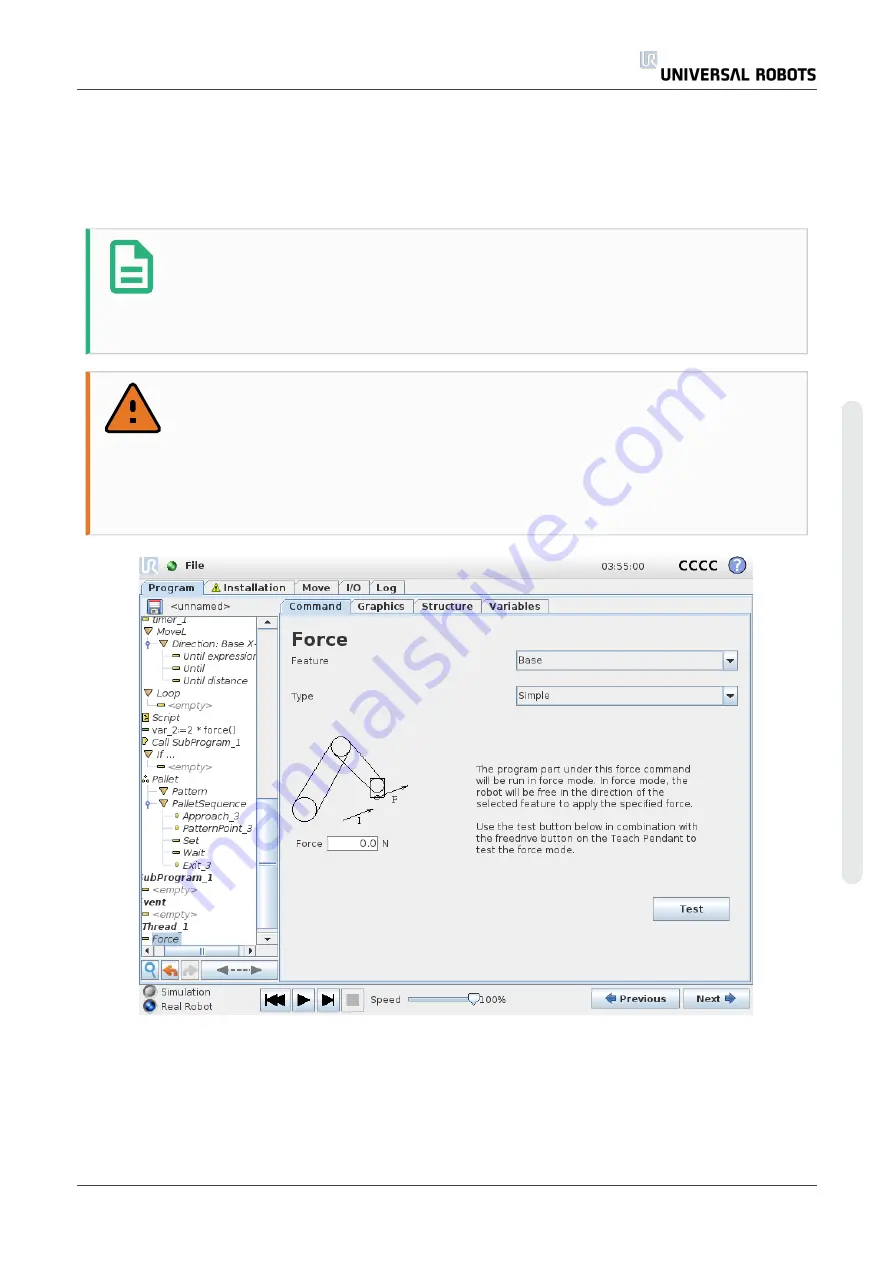
NOTE
If there is a Force node inside an
If
,
ElseIf
or
Loop
, and the
Check
Expression Continuously
option is selected, you can add an
end_force_
mode()
script at the end of the expression to exit force control.
WARNING
1. Avoid high deceleration just before entering force mode.
2. Avoid high acceleration in force mode, since it decreases force control
accuracy.
3. Avoid movements parallel to compliant axes before entering force mode.
Feature selection
The
Feature menu
is used to select the coordinate system (axes) the robot will use while it is
operating in force mode. The features in the menu are those which have been defined in the
installation (see
).
User Manual
193
UR10
C
o
p
yr
ig
h
t
©
2
0
0
9
–
2
0
2
0
b
y
U
n
iv
e
rs
a
l
R
o
b
o
ts
A
/S
.
A
ll
ri
g
h
ts
re
s
e
rv
e
d
.
Содержание UR10/CB3
Страница 1: ...Universal Robots User Manual UR10 CB3 Original instructions en...
Страница 28: ...UR10 20 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 30: ...UR10 22 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 36: ...UR10 28 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 56: ...UR10 48 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 62: ...UR10 54 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 64: ...UR10 56 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 68: ...Safety System Certificate UR10 60 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 69: ...TUV Rheinland User Manual 61 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 72: ...China RoHS UR10 64 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 73: ...KCC Safety User Manual 65 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 74: ...KC Registration UR10 66 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 92: ...UR10 84 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 94: ...UR10 86 User Manual Part II PolyScope Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 116: ...UR10 108 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 124: ...UR10 116 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 164: ...UR10 156 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 214: ...UR10 206 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 249: ...Software Version 3 14 User Manual 241 UR10 2 Glossary Copyright 2009 2020 by Universal Robots A S All rights reserved...







































































