





























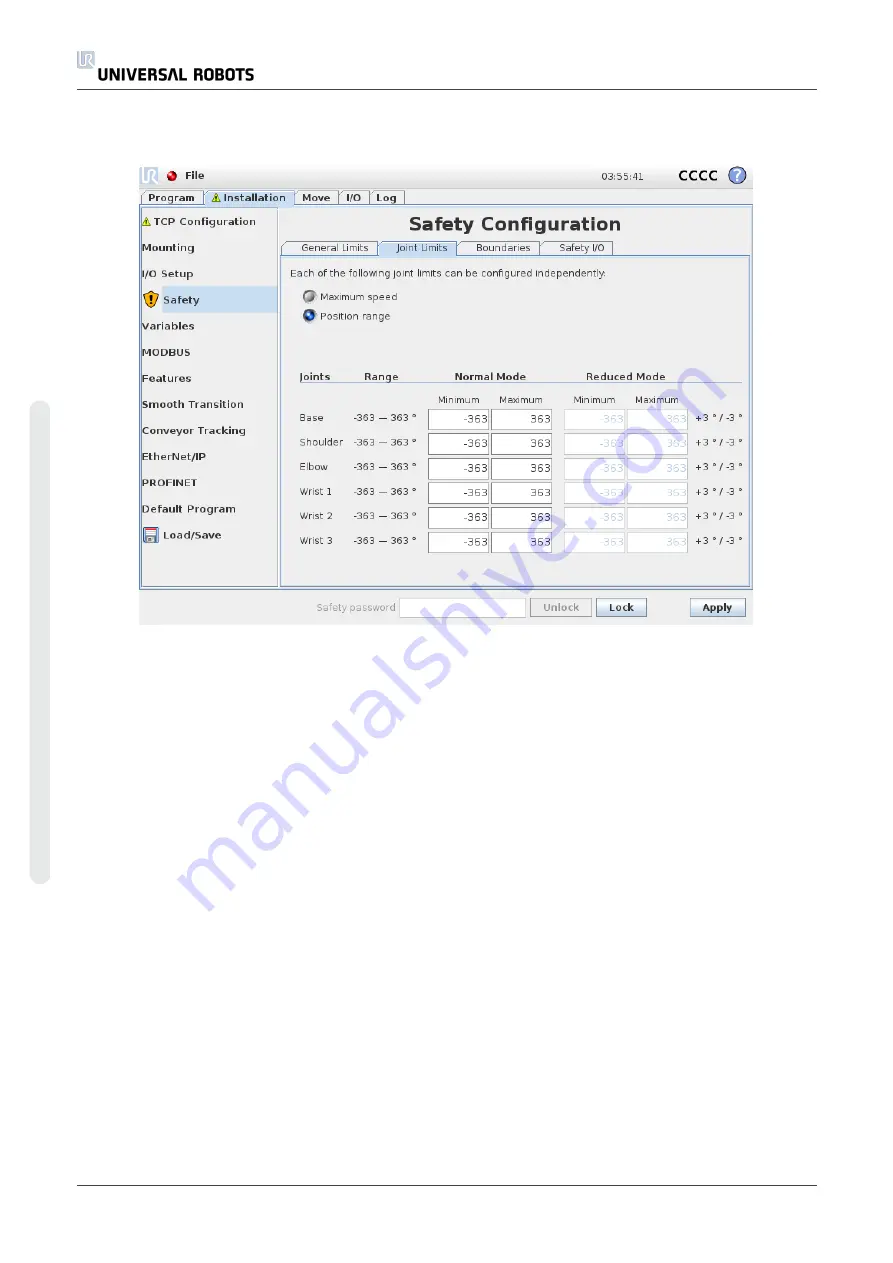
1.20.11. Joint Limits
Joint limits restrict the movement of individual joints in joint space, i.e. they do not refer to
Cartesian space but rather to the internal (rotational) position of the joints and their rotational
speed. The radio buttons in the upper portion of the subpanel make it possible to independently
set up
Maximum Speed
and
Position Range
for the joints.
When in
Freedrive
mode (see
), and the current position or speed of a joint
is close to the limit, the user will feel a repelling force which increases in magnitude as the joint
approaches the limit. The force is generated when joint speed is within approximately 20 °/s of
the speed limit or joint position is within approximately 8 ° of the position limit.
The Wrist 3 position range is unlimited by default. When using cables attached to the robot, you
must first disable the
Unrestricted Range for Wrist 3
checkbox to avoid cable tension and
protective stops.
Maximum Speed
This option defines the maximum angular velocity for each joint. This is done by tapping the
corresponding text field and entering the new value. The highest accepted value is listed in the
column titled
Maximum
. None of the values can be set below the tolerance value.
Note that the fields for limits in
Reduced
mode are disabled when neither a safety plane nor a
configurable input is set to trigger it (see
1.20.13. Safety I/O on page 104
for more details).
Furthermore, the limits for
1.20.12. Boundaries on the facing page
and
Reduced
mode must not
be higher than their
Normal
mode counterparts.
UR10
96
User Manual
C
o
p
yr
ig
h
t
©
2
0
0
9
–
2
0
2
0
b
y
U
n
iv
e
rs
a
l
R
o
b
o
ts
A
/S
.
A
ll
ri
g
h
ts
re
s
e
rv
e
d
.
Содержание UR10/CB3
Страница 1: ...Universal Robots User Manual UR10 CB3 Original instructions en...
Страница 28: ...UR10 20 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 30: ...UR10 22 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 36: ...UR10 28 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 56: ...UR10 48 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 62: ...UR10 54 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 64: ...UR10 56 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 68: ...Safety System Certificate UR10 60 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 69: ...TUV Rheinland User Manual 61 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 72: ...China RoHS UR10 64 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 73: ...KCC Safety User Manual 65 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 74: ...KC Registration UR10 66 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 92: ...UR10 84 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 94: ...UR10 86 User Manual Part II PolyScope Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 116: ...UR10 108 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 124: ...UR10 116 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 164: ...UR10 156 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 214: ...UR10 206 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Страница 249: ...Software Version 3 14 User Manual 241 UR10 2 Glossary Copyright 2009 2020 by Universal Robots A S All rights reserved...





































































