

















PDx-170-57-E / TMCM-170 Hardware Manual (V1.10 / 2011-NOV-24)
14
Copyright © 2011, TRINAMIC Motion Control GmbH & Co. KG
“Actual Commutation Offset” gives the angular relationship between motor and encoder.
Therefore this parameter has to be stored correctly in EEPROM before power on! Do not
enable this mode, before the parameter has been set correctly. Mode 4 helps for the very
first initialization of this mode.
Mode 4
helps to do a first initialization and tuning of mode 3. It searches for the N-channel
reference point first, and then does a
mode 2
initialization to determine the correct setting
for the “Actual Commutation Offset”. The encoder N-channel polarity has to be high active
for this mode (the actual setting of the encoder null polarity has no influence in this mode),
and, additionally, you have to specify the polarity of the encoder A- and B-channel upon N-
channel activity using the setting “Encoder Null Polarity”, bits 1 and 2. The correct setting of
this depends on the encoder. If the N-channel referencing fails, the motor does two full
rotations and then stops. Try again with reversing the “Encoder Null Polarity”. After
successfully initializing the “Actual Commutation Offset”, you can try moving the motor and
tune the offset, if desired. Then store the offset and switch to
mode 3
. If any encoder errors
are flagged during operation of the motor, retry with a modified setting for A- and B-
channel polarity.
Attention: Initialization modes 1 to 4 apply a high current to the motor for a few seconds. Be sure
to parameterize the initialization current correctly (i.e. not more than 2* the maximum
rated motor current) before first powering on the unit.
The quality of the initialization phase result can be checked by rotating the motor left and right at the
maximum velocity (use a velocity setting slightly higher than the motor can follow). Maximum velocity
for left and right direction shall not differ by more than a few percent. Also make some checks if
results are reproducible.
Whenever changing one of these parameters, re-power the unit to restart initialization phase!
6.3
Encoder setting
The N-channel (index channel) of the encoder is not required for motor operation, but it is very good
for motor initialization, because it gives an absolute and exact reference point. So, the motor
initialization modes 3 and 4 use the N-channel for motor initialization. Behavior of the N-channel
signal is very dependent on the encoder type and has to be taken into account for the setting of the
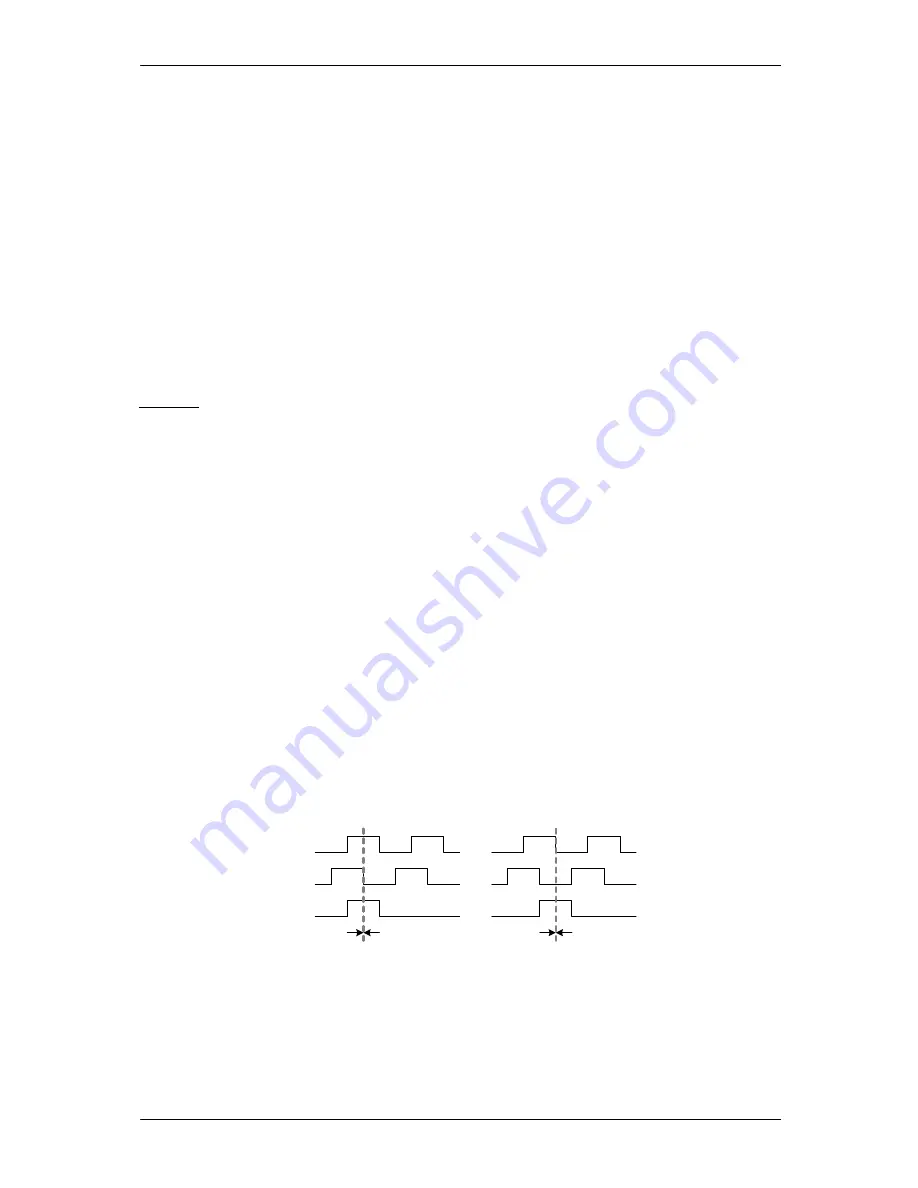
TMCM170 encoder interface. Please refer to the following figure for correct setting of the Encoder Null
Polarity flag.
A wrong setting may either hinder the module from initializing the sine mode, or might lead to the
Encoder Error flag being set, in spite of correct encoder function.
zero event
Enc-A
Enc-B
Enc-N
(index)
Set Encoder Null
Polarity to
binary 011
Set Encoder Null
Polarity to
binary 001
zero event
CW turn
CCW turn
CW turn
CCW turn
0
1
0
0





















































