





























124
CAN bus data event capturing
Monitoring method is used when user wants to receive CAN data on regular basis, for
example every 20 seconds.
Event functionality is used to store additional AVL packet when state of CAN element is
changing. For example Speed changes, low fuel level, engine temperate, etc.
Send data to server field – allows enabling CAN element so it is added to the AVL data
packet and sent to the server. By default, all CAN elements are disabled and FM1100 records
only GPS data.
It is possible to set CAN message priority: On Low Priority, On High Priority, and On Panic.
Regular packets are sent as Low priority records. When low priority event is triggered, FM1100
makes additional record with indication what was the reason for that was CAN element change.
When High priority is selected, module makes additional record with high priority flag and sends
event packet immediately to the server by GPRS. Panic priority triggers same actions as high
priority, but if GPRS fails, it sends AVL packet to server using SMS mode if SMS is enabled in SMS
settings.
Data Acquisition Type – defines when to generate event – when value enters defined
range, exits it or both, also is possible to select event which you want to generate then you
change values, like crossing both values in high and low levels (Hysteresis).
High and Low levels – defines CAN value range. If CAN value enter or exits this range,
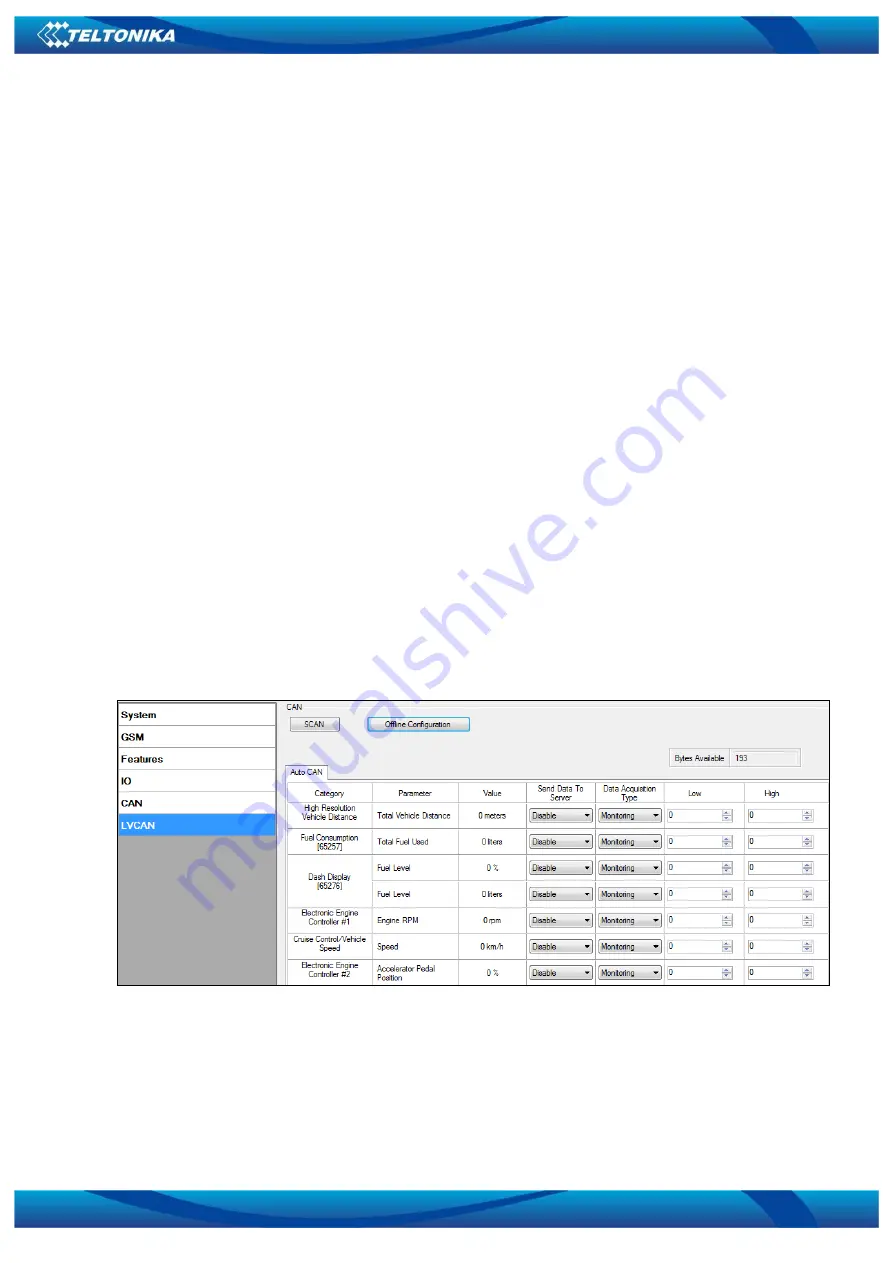
FM1100 generates event by “Data Acquisition Type” settings. Figure 89 show example of
FM1100 CAN configuration.
Figure 89 Configurator example
Available CAN Bus IO parameters and configuration can be found in Configurators LVCAN
tab (Figure 83) and in next chapter “Parameters ID”.
Содержание FM5500
Страница 25: ...25 Figure 16 FM5500 firmware updater screen...
Страница 67: ...67 Figure 53 Unknown Operator List...
Страница 155: ...155 24 2016 08 22 2 08 Corrected Virtual COM Port driver download link...







































































