





























RTK vs. PPK
RTK positioning requires differential corrections from a base station with a pre-surveyed position before the flight. In most
applications, these differential corrections are passed to the rover (the aircraft) receiver in real time necessitating a reliable
communication link between Base and rover. For drone applications, this can be problematic. The equipment required for an additional
communication link between the rover and base station can significantly add to the payload and power consumption of the aircraft.
Furthermore, if your link is interrupted during flight, that portion of the flight will loose accurate correction data.
When everything is working well, the accuracy of RTK and
will be similar. However, if the rover
slips, multi-path or data gaps,
becomse the more accurate option. With
there is also the benefit of being able to look at the
entirety of the recorded data and run through it forward in time from the beginning to the end of the flight as well as backwards in time
from the end of the flight. The ability to perform this forward and backward smoothing of the data is not possible with RTK, which is
only calculated in real-time.
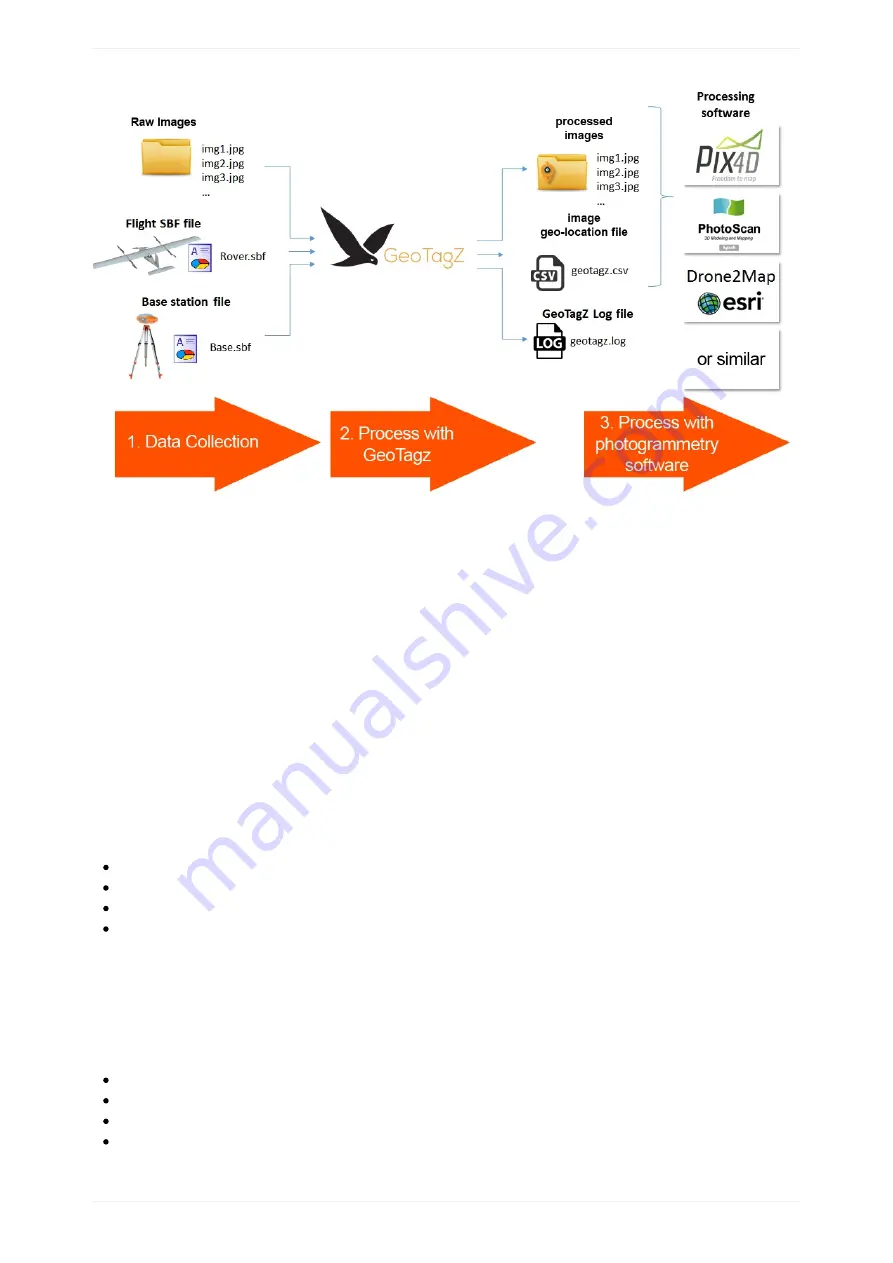
Required for Precision
For
image processing using GeoTagZ you will need:
Standard mapping payload (24M P)
SBF data from the aircraft receiver containing
measurements and camera shutter events
Base station data in SBF or RINEX format. This can be downloaded from either a nearby reference network or from your own
receiver, such as an Altus NR3 configured as a base station
measurement data from the aircraft and base receivers to reprocess the positioning. The images
will then be automatically tagged with the new positions and can be easily imported to photogrammetry software.
GeoTagz Features
+GLO reprocessing for cm-level RTK precision
GUI and command line versions offering identical functionality
SBF input for the aircraft rover file
SBF or RINEX input for the base station reference file
PPK Tagging
116
Содержание Lynx VTOL
Страница 6: ...Package Contents Package Contents 6...
Страница 18: ...3 Right click on the USB Serial Port and select properties Getting Started 18...
Страница 19: ...4 Swap to the Port Settings tab and select Advance Getting Started 19...
Страница 51: ...No Warnings Verify Ensure that there are no warnings before takeoff All warnings must be resolved Preflight 51...
Страница 86: ...Landing 86...
Страница 87: ...Payloads Standard Mapping Payload Multispectral Mapping Payload Custom Payloads Payloads 87...
Страница 94: ...Standard Mapping Payload 94...
Страница 105: ...5 On the camera tab you can view the camera s field of view or manually capture photos Multispectral Mapping Payload 105...
Страница 108: ...Mounting Custom Payloads 108...
Страница 110: ...Post Processing Geo Tagging PPK Tagging Base Station Reference Stations Post Processing 110...
Страница 114: ...Geo Tagging 114...
Страница 130: ...Battery Charging Charging Storage Battery Management 130...
Страница 136: ...Second Battery Start Charging 136...
Страница 143: ...Second Battery Start Storage 143...
Страница 149: ...Replacing the Main Propeller 149...
Страница 167: ...Getting Logs 167...
Страница 171: ...2019 02 11 Ensure the landing checklist matches the GCS landing checklist Manual Changelog 171...







































































