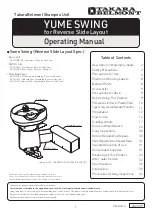
Working range diagram
Scanning range in m (feet)
1
Scanning range in m (feet)
1
Scanning range max. 15 m (49.21 feet)
2
Scanning range typical (for objects with 10 % remission):
8 m (26.25 feet)
3
180°
‒30°
210°
240°
90°
0°
0
20
(65.62)
–20
(–65.62)
10
(32.81)
–10
(–32.81)
30
(98.43)
–30
(–98.43)
0
20
(65.62)
–20
(–65.62)
10
(32.81)
–10
(–32.81)
30
(98.43)
–30
(–98.43)
Figure 21: Working range diagram
1
Sensing range in meters (feet)
2
Maximum sensing range: 15 m
(49.21 feet)
3
Typical sensing range for objects with
10% remission: 8 m (26.25 feet)
10.2
Performance
Variant
TiM4xx
Response time
Typ. 67 ms
Detectable object
shape
Almost any
Measurement
errors
Statistical (1 σ): < 20 mm
1
/ < 10 mm
2
Systematic: ± 60 mm
1
Temperature drift: 0.5 mm/K
Scan field flat‐
ness
± 1.5°
Integrated appli‐
cation
Measurement data output (radial distance, RSSI signal level, device and
status information, time stamp)
1
Typical value at 90% remission up to maximum sensing range; real value depends on ambient conditions.
2
Only devices with HDDM measurement principle: Typical value at 10% remission up to 6 m sensing
range; real value depends on ambient conditions.
10.3
Interfaces
Variant
TiM4xx
Ethernet
TCP/IP
Max. data transmission rate: 10 Mbit and 100 Mbit
Length of cable: max. 100 m
Digital outputs
1 (PNP, SYNC/Device Ready)
I
out
≤ 100 mA, not electrically isolated from the supply voltage, short-circuit
proof/temperature protected
Optical indicators
2 LEDs (ON, Device Ready)
10
TECHNICAL DATA
36
O P E R A T I N G I N S T R U C T I O N S | TiM4xx
8026151//2020-11-15 | SICK
Subject to change without notice