9
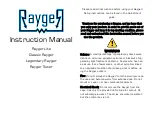
Buffer Memory
Buffer Memory Address
(Hexadecimal number)
Name
Content
Setting necessary / not necessary
(
○
necessary
x
not necessary)
Axis
1
Axis
2
Axis
3
Axis
4
E point
control
P point
control
JOG
operati
on
Home
Positio
n
Pulse
Opera
tion
100h
110h
120h
130h
Control
Code
Acceleration/Deceleration
method(Linear, S-pattern)
control
method(Incremental,
Absolute) Home Return
and logic Pulse
○
○
○
○
○
101h
11h
121h
131h
102h
112h
122h
132h
Starting
speed
fs[pps]
Starting speed setting
setting range
0to+1,000,000[pps]
○
○
Only
first
stage
○
○
x
103h
113h
123h
133h
104h
114h
124h
134h
Target
Speed
ft[pps]
Target Speed setting
setting range
1to+1,000,000[pps]
○
○
○
○
○
105h
115h
125h
135h
106h
116h
126h
136h
Acceleration
/
Deceleration
Time
Ac[pulse]
Acceleration/Deceleration
Time setting range 0 to
+32,767[ms]
○
○
○
○
x
107h
117h
127h
137h
108h
118h
128h
138h
Position
Instruction
value
Pt[pulse]
Position Instruction value
setting signed 32bit -
2,147,483,648to
○
○
x
x
x
109h
119h
129h
139h
10Ah
11Ah
12Ah
13Ah
Elapsed
pulse
Pe[pulse]
Elapsed pulse count
(Absolute) signed 32bit -
2,147,483,648to
+2,417,483,647[Pulse]
10Bh
11Bh
12Bh
13Bh
10Ch
11Ch
12Ch
13Ch
Number of
comparing
pulses
Pc[pulse]
Comparing Pulse setting
signed 32bit -
2,147,483,648 to
+2,417,483,647[Pulse]
10Dh
11Dh
12Dh
13Dh
1.
Buffer Memory area is commonly used for E point control, P point
control, JOG operation, home return, pulse generator, or input
operation, so care should be taken not to overwrite the memory
area with other simultaneously.
2. For the first speed of E POINT control and P POINT control, JOG
operation, and home return, target speed should be greater than
starting speed.
3. Symbol
will be read or input as necessary.
CAUTIONS
Содержание NX-POSI1
Страница 1: ...Catalog Number s NX70 POSIx NX POSIx NX70 700 Position User Manual ...
Страница 6: ...6 ...
Страница 14: ...14 ...
Страница 22: ...22 ...
Страница 38: ...38 ...
Страница 64: ...64 ...
Страница 79: ...79 Program ...
Страница 82: ...82 Program ...
Страница 106: ...106 Pulse output diagram ...
Страница 107: ...107 Sample Program ...
Страница 110: ...110 ...
Страница 123: ...123 Action of the I O Flag Before and After a Home Return Operation Return Operation ...
Страница 132: ...132 ...
Страница 145: ...145 11 Deceleration Stop and Forced Stop Sample Program In progress Stopping Emergency Stopping Overrun ...
Страница 147: ...147 Pulse output diagram Deceleration stop operation In progress stop ...
Страница 148: ...148 Forced stop operation Emergency stop Overrun ...
Страница 158: ...158 ...
Страница 170: ...170 ...
Страница 178: ...178 Oriental Motor Co Ltd UPK W Series Open collector output stepping drive connection ...
Страница 179: ...179 NX700 PLC External Dimensions 1 System Dimensions mm Motherboard Installation Diagram mm ...
Страница 180: ...180 2 CPU I O Analog Unit Dimensions mm 3 Special Unit Dimensions mm ...
Страница 183: ...183 Program ...
Страница 187: ...187 Program ...
Страница 188: ...188 ...
Страница 194: ...Publication NX700 UM007A PositionA EN December 2010 ...
Страница 195: ......
Страница 196: ...Copyright 2010 RS Automation Co Ltd All rights reserved ...