
























2/22/2018
ROBOTIS e-Manual
http://emanual.robotis.com/docs/en/dxl/x/xm430-w210/
24/34
Unit
Value Range
Description
0.229 rpm 0 ~ Velocity Limit(44) ‘0’ stands for an infinite velocity
The Profile is an acceleration/deceleration control method to
reduce vibration, noise and load of the motor by controlling
dramatically changing velocity and acceleration.
It is also called Velocity Profile as it controls acceleration and
deceleration based on velocity.
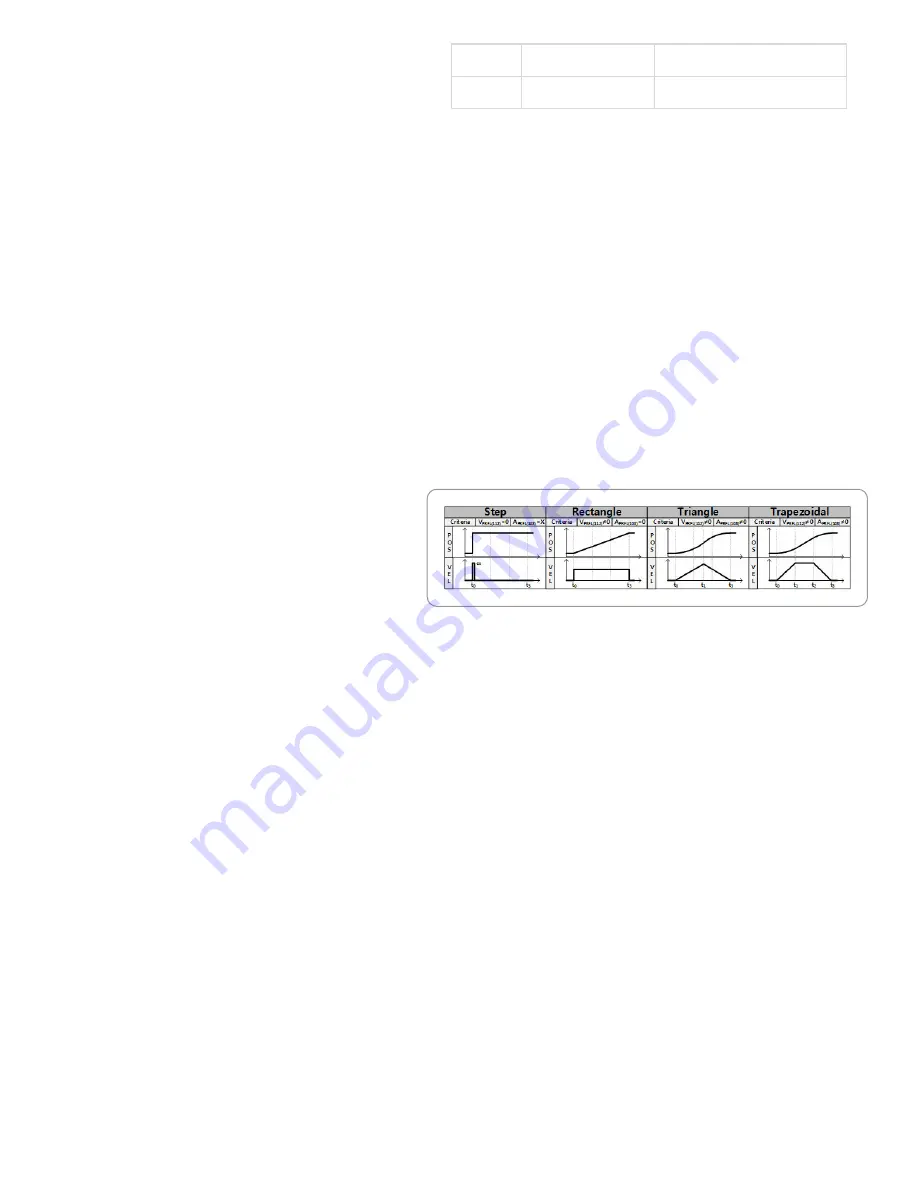
DYNAMIXEL provides 4 different types of Profile.
The following explains 4 Profiles and how to select them.
Profiles are usually selected by a combination of Profile
Velocity(112) and Profile Acceleration(108).
Triangular and Trapezoidal Profiles exceptionally consider total
travel distance(ΔPos, the distance difference between target
position and current position) as an additional factor.
For convenience, Profile Velocity(112) is abbreviated to V
PRFL
and Profile Acceleration(108) is abbreviated to A
PRFL
.
‘X’ stands for “Don’t Care” case.
When given Goal Position(116), Dynamixel’s profile creates
target velocity trajectory based on current velocity(initial
velocity of the Profile).
When Dynamixel receives updated target position from a new
Goal Position(116) while it is moving toward the previous Goal
Position(116), velocity smoothly varies for the new target
velocity trajectory.
Maintaining velocity continuity while updating target velocity
trajectory is called Velocity Override.
For a simple calculation, let’s assume that the initial velocity of
the Profile is ‘0’.
The following explains how Profile processes Goal
Position(116) instruction in Position Control mode, Extended
Position Control Mode, Current-based Position Control Mode.
1. An Instruction from the user is transmitted via Dynamixel
bus, then registered to Goal Position(116).
2. Acceleration time(t1) is calculated from Profile
Velocity(112) and Profile Acceleration(108).
3. Types of Profile is decided based on Profile Velocity(112),
Profile Acceleration(108) and total travel distance(ΔPos, the
Back to Top ▲







































































