





























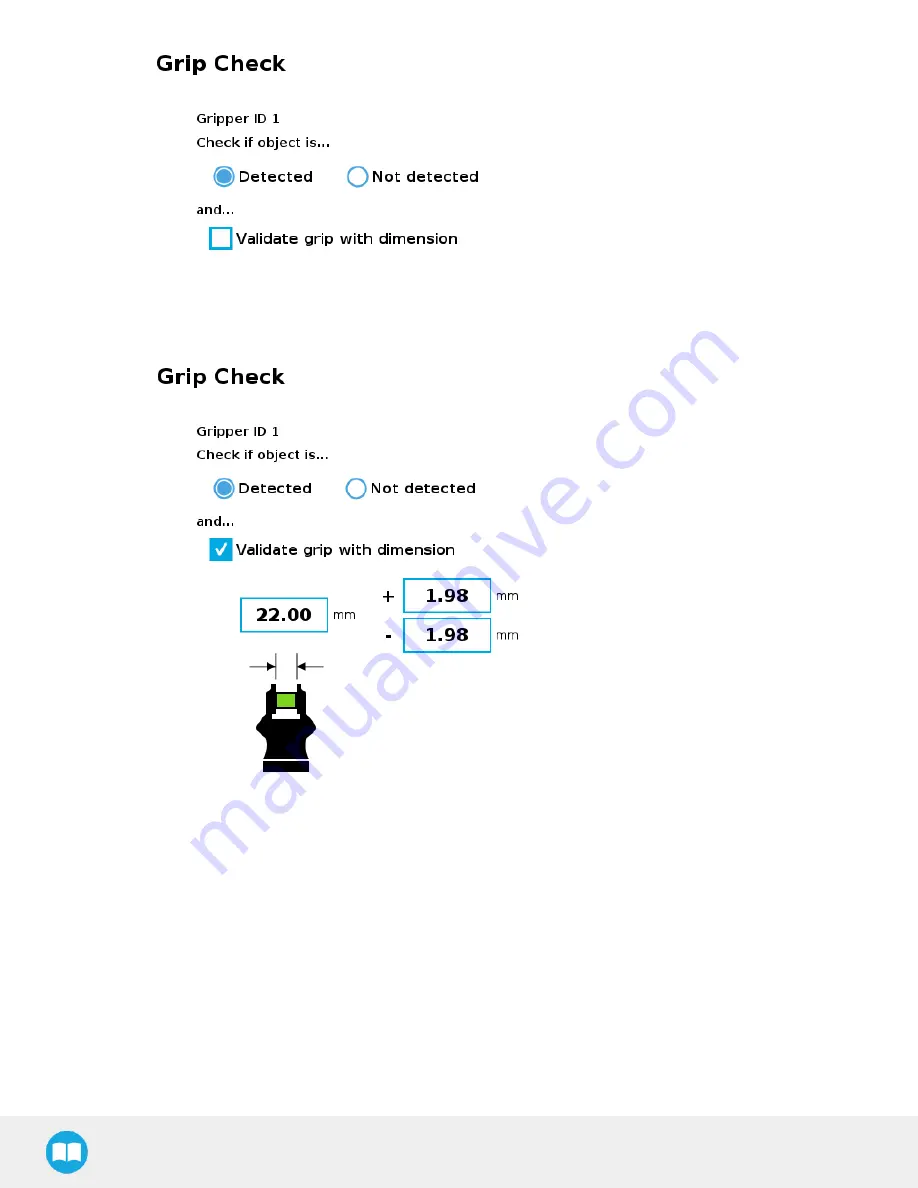
Fig. 4-12: Grip Check node interface
Fig. 4-13: Grip Check node interface with dimension validation
Given that the Grip Check node is an If statement, tapping the actual node in the Command tab brings up the option to add an Else
instruction to the program tree.
About
In this window, the user can access information such as the Gripper's hardware, software and firmware versions, the number of cycles
completed by the device and more.
1
Create or load a robot program
2
Tap the Installation tab
48





































































