





























RS-Ruby Lite Users’ Manual
13
6 Time Synchronization
RS-Ruby Lite supports two time synchronization modes, one is external GPS + PPS and the
other is PTP. Mode switching can be realized through using web application(please refer to
Appendix A.2).
6.1 GPS Synchronization
The time of RS-Ruby Lite can be synchronized with GPS module from external.
6.1.1 Principle of GPS Synchronization
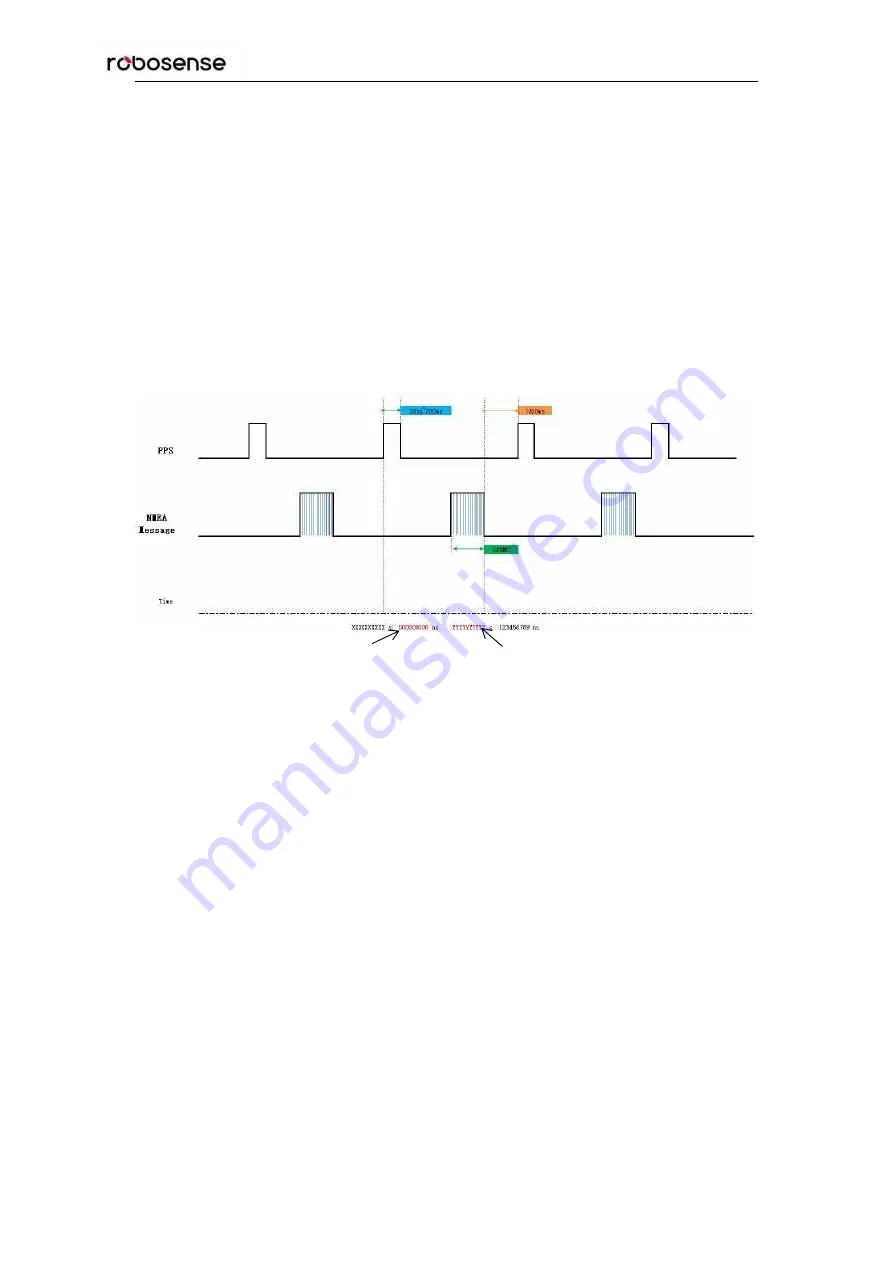
Figure 7: Timing Sequence Diagram of GPS Synchronization.
The GPS module keeps generating synchronization Pulse Per Second (PPS) signal, GPRMC
messages and sends them to the sensor. The pulse width of the PPS should be between 10us
to 200ms, and the GPRMC message should be received within 500ms after this rising edge of
this PPS signal.
6.1.2 GPS Usage
GPS_REC
receives the signal from GPS module with standard serial RS232 communication
protocol. The interface format of GPS_REC is SH1.0-6 female connector, the pin definition can
be referred in Figure 3.
GPS PULSE
receives the positive PPS signal from the GPS module and requests voltage
between 3.0 V ~ 15.0 V.
PIN +5V
of GPS interface can supply power to GPS module. (If GPS module is only allowed to
use +3.3V as power supply, please do not use this +5V PIN on Interface Box. Please
exchange the +5V to +3.3V)
PIN GND
is connected to ground wire of the GPS module.
The GPS module should be set to 9600bps baud rate, 8-bit data bit, no parity and 1 stop bit.
RS-LiDAR-Ruby only reads the GPRMC message from GPS module., the GPSMRC message
format is shown as below:
Reset part of sub-second
According to GPRMC message, synchronize the part of second
Содержание RS-Ruby Lite
Страница 1: ...RS Ruby Lite Users Manual...
Страница 49: ...RS Ruby Lite Users Manual 44 Appendix E Dimension Figure E 1 Dimensions of Ruby...
Страница 52: ...RS Ruby Lite Users Manual 47...
Страница 53: ...RS Ruby Lite Users Manual...
Страница 101: ...RS Ruby Lite Users Manual 44 Appendix E Dimension Figure E 1 Dimensions of Ruby...
Страница 104: ...RS Ruby Lite Users Manual 47...