Triangulation Laser Sensors, RF605 Series
RF605 [Revision 2.0] 10th January 2011 valid for sensors with serial numbers 11000 and higher
16
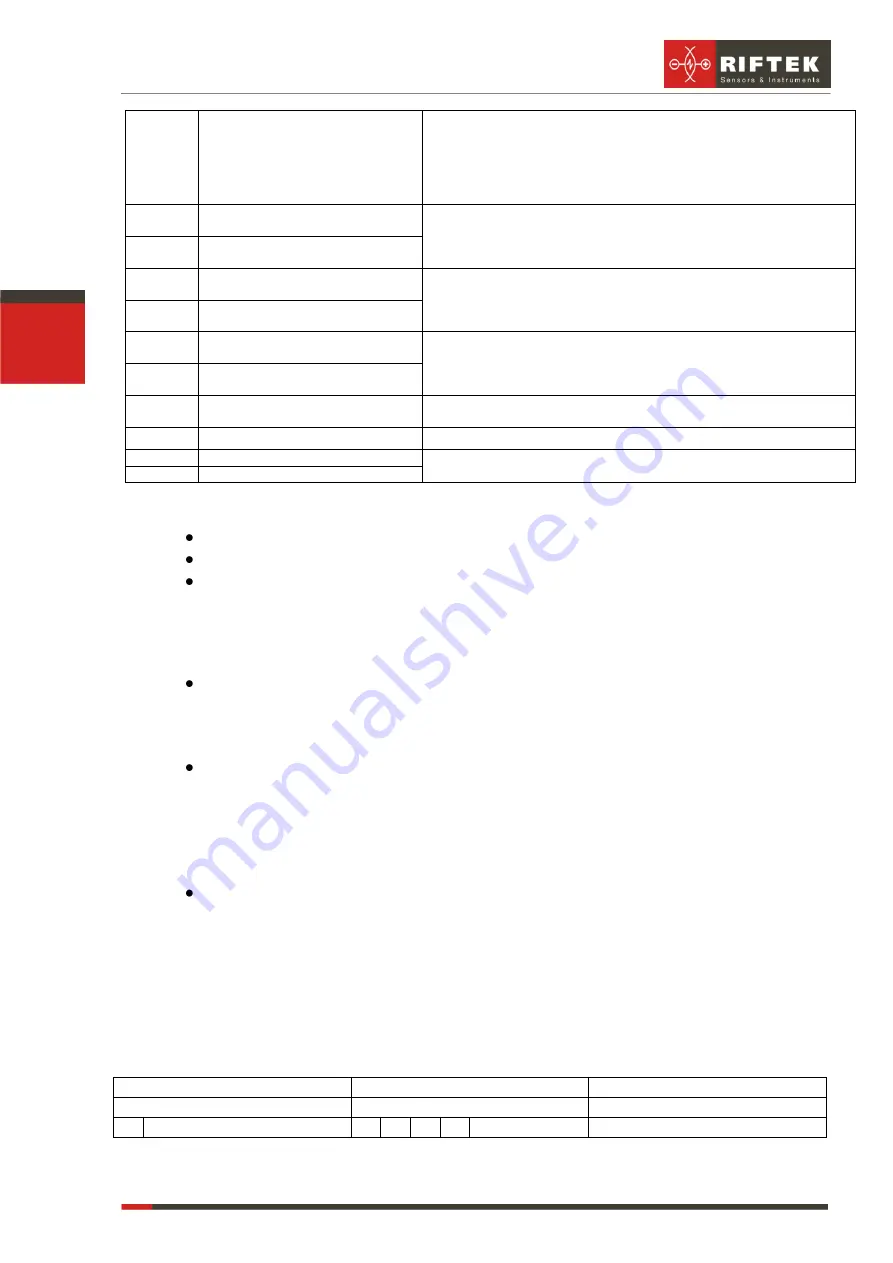
09h
Higher byte of the sampling period
the time interval in increments of 0.01 ms with which sensor au-
tomatically communicates of results on streaming request (priority
of sampling = 0);
2) 1
…65535, (default — 500)
divider ratio of trigger input with which sensor automatically com-
municates of result on streaming request (priority of sampling = 1)
0Ah
Lower byte of maximum integration
time
2…65535, (default — 200) specifies the limiting time of integration by
CMOS-array in increments of 1mks
0Bh
Higher byte of maximum integration
time
0Ch
Lower byte for the beginning of
analog output range
0…4000h, (default — 0) specifies a point within the absolute range of
transducer where the analog output has a minimum value
0Dh
Higher byte for the beginning of
analog output range
0Eh
Lower byte for the end of analog
output range
0…4000h, (default — 4000h) ) specifies a point within the absolute
range of transducer where the analog output has a maximum
value
0Fh
Higher byte for the end of analog
output range
10h
Time lock of result
0…255, specifies of time interval in increments of 5 mс
11
…16h
Reserved
17h
Lower zero point
0…4000h, (default — 0) specifies beginning of absolute coordinate
system.
18h
Higher byte zero point
13.3. Notes
All values are given in binary form.
Base distance and range are given in millimeters.
The value of the result transmitted by a sensor (D) is so normalized that
4000h (16384) corresponds to a full range of the sensor (S in mm), therefore,
the result in millimeters is obtained by the following formula:
X=D*S/4000h (mm) (1).
On special request (05h), the current result can be latched in the output buffer
where it will be stored unchanged up to the moment of arrival of request for
data transfer. This request can be sent simultaneously to all sensors in the net
in the broadcast mode in order to synchronize data pickup from all sensors.
When working with the parameters, it should be borne in mind that when
power is OFF the parameter values are stored in nonvolatile FLASH-memory
of the sensor. When power is ON, the parameter values are read out to RAM
of the sensor. In order to retain these changes for the next power-up state, a
special command for saving current parameter values in the FLASH-memory
(04h) must be run.
Parameters with the size of more than one byte should be saved starting
from the high-order byte and finishing with the low-order byte.
13.4. Examples of communication sessions
1) Request "Device identification".
Condition: device address
—1, request code – 01h, device type — 61, firmware release
— 88 (58h), serial number — 0402 (0192h), base distance — 80mm (0050h), measure-
ment range
— 50мм (0032h), packet number — 1.
The request format:
Byte 0
Byte 1
[ Bytes
2…N ]
INC0(7:0)
INC1(7:0)
MSG
0
ADR(6:0)
1
0
0
0
COD(3:0)
Request from
―Master"
Содержание RF603 Series
Страница 1: ......