





























30
15. Kalibrieren der Lagesensoren
Sollte der Quadrocopter nicht ruhig auf der Stelle schweben, sondern ständig in eine Richtung fliegen, kann das
mit der Trimmung korrigiert werden. Muss dazu die Trimmung aber sehr weit verstellt werden, kann es erforderlich
werden, die Lagesensoren im Modell neu zu kalibrieren.
Gehen Sie dazu wie folgt vor:
Stellen Sie dann den betriebsbereiten Quadrocopter auf einen ebenen, waagerecht ausgerichteten Untergrund.
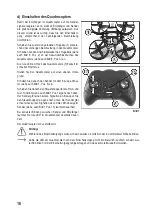
Bewegen Sie anschließend die beiden Steuerknüppel des
Senders in die jeweils rechte untere Ecke und halten die
beiden Steuerknüppel in dieser Position fest.
Der Sender gibt einen kurzen Signalton ab und die LED im
Quadrocopter beginnt zu flackern.
Die Steuerknüppel können nun in die Mittelstellung bewegt
werden.
Nach kurzer Zeit ist die Kalibrierung abgeschlossen und
die rote LED des Quadrocopters leuchtet wieder dauerhaft.
Überprüfen Sie mit einem Testflug, ob der Quadrocopter
immer noch die starke Tendenz aufzeigt, in eine bestimmte
Richtung zu fliegen. Minimale Tendenzen können über die
Trimmung ausgeglichen werden.
Bei Bedarf ist die Kalibrierung der Lagesensoren zu wiederholen.
Bild 21







































































