





























RealMan (Beijing) Intelligent Technology Co., Ltd.
69
1. Tool Display
The table shows the names and pose parameters of all tool coordinate systems
established by the current robot. To delete a tool, select it in the table and click the
“Delete Tool” button. After the deletion is completed, the robot operates in the end
flange coordinate system. In addition, the Arm_Tip (robot arm tool end coordinate
system) cannot be deleted.
2. Automatic Calibration
After selecting this feature, the current tool coordinate system can be calibrated by the
six-point method. First, fill in the name of the tool (English characters, no more than
10 characters), and then contact the tool reference point with the robot tools in six
positions respectively (this reference requires that the end is sharp and placed vertically).
After the 6 points have been calibrated, click “Add Tool” to automatically calculate the
current tool information according to the 6 points. After the calculation is completed, it
will be sent back to the teaching software and displayed in the tool list. In addition, due
to the memory limitation of the robot controller, only 10 tool coordinates can be saved,
so please make sure that the limit will not be exceeded before calibration. After the
calibration is successful, the robot enters the tool coordinate system whose center is the
center of the flange.
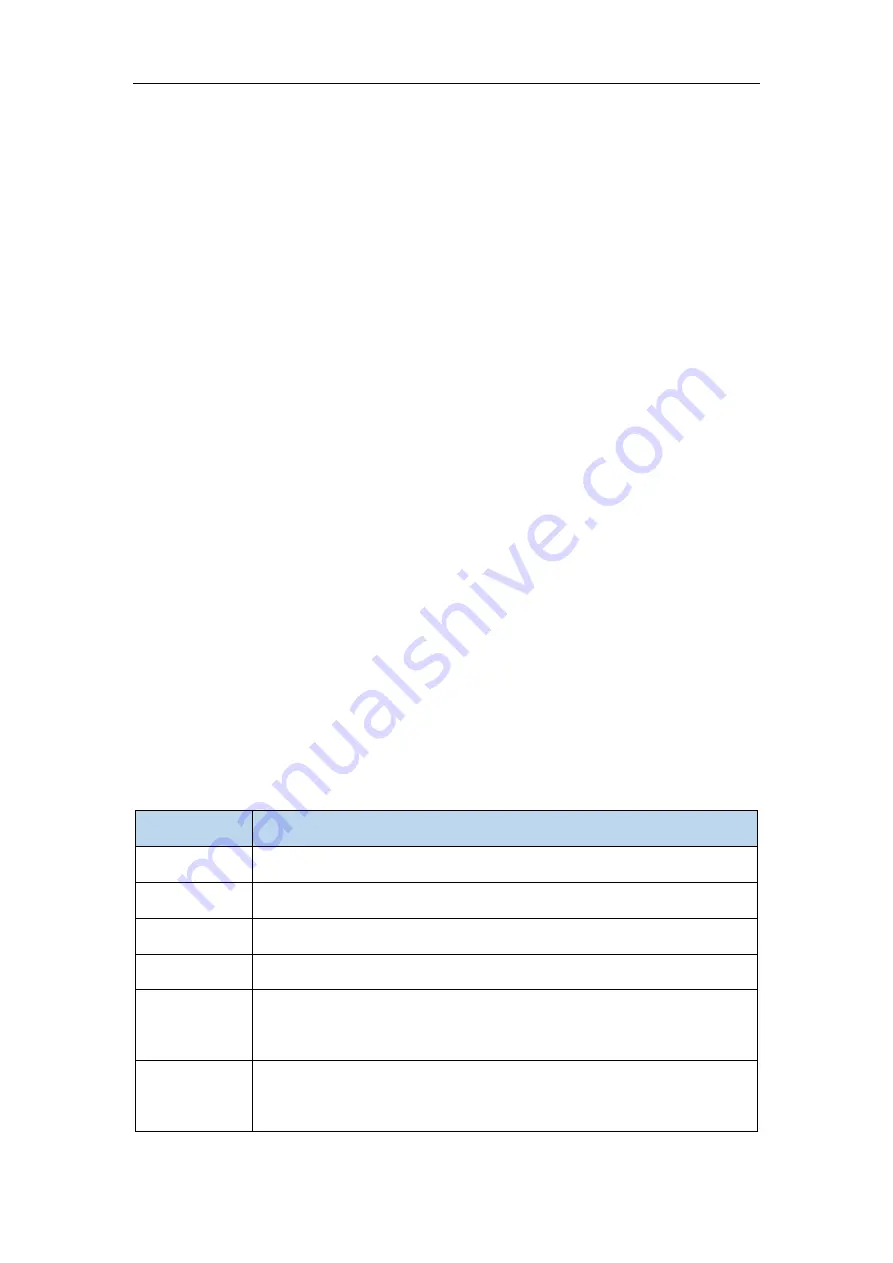
The calibration rules of six-point method are shown below.
Table 8 The content of the six-point calibration method.
#
Name
1
Any pose, tool end in contact with reference end.
2
Any pose, tool end in contact with reference end.
3
Any pose, tool end in contact with reference end.
4
Tool end in vertical pose, and in contact with reference end.
5
Keeping the pose of #4 and moving from #4 to some position along
the negative x-axis of the Base coordinate system.
6
Keeping the pose of #4 and moving from #4 to some position along
the positive z-axis of the Base coordinate system.