

















17
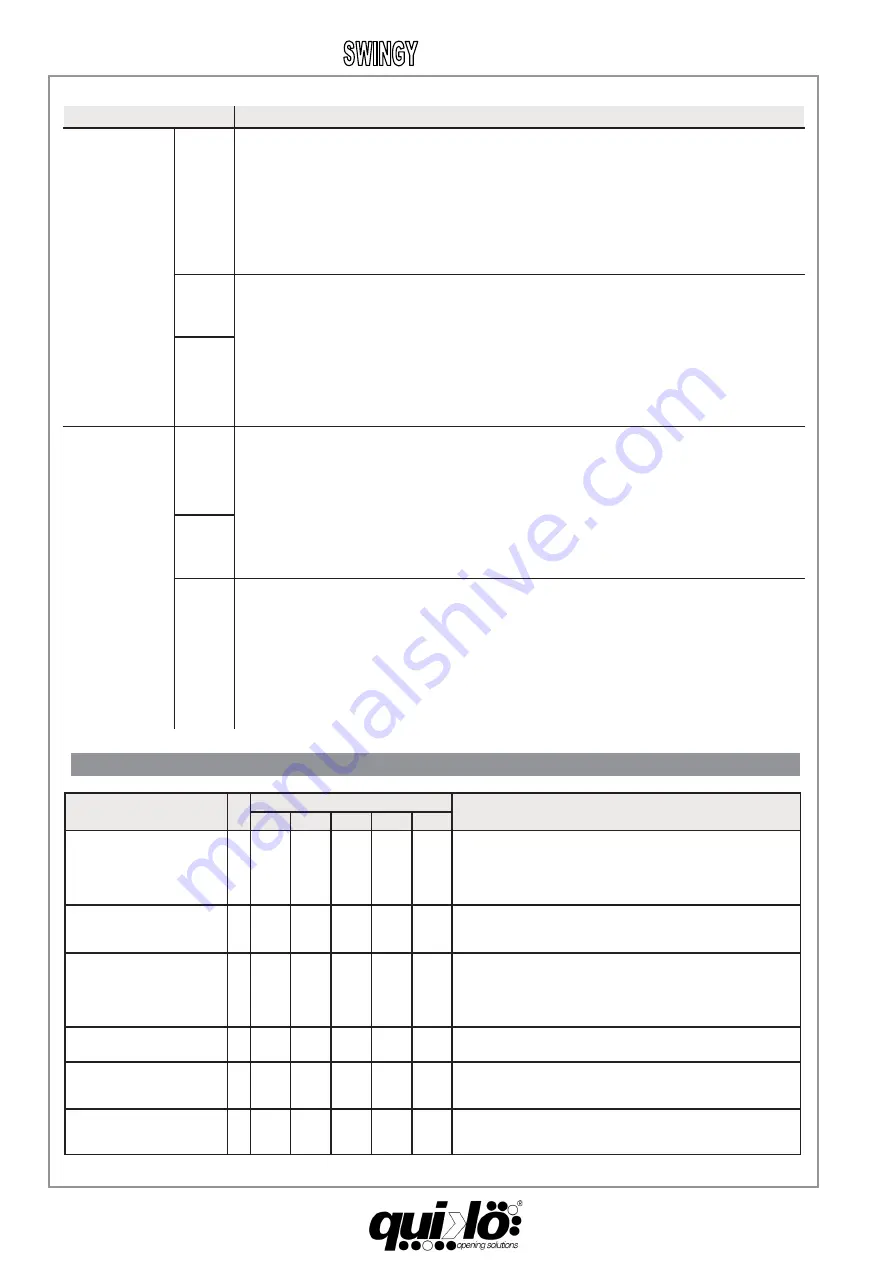
Error Message Table
BL. = Blinking
DESCRIPTION
N.
LED
WHAT TO DO
AV
OC
L1
L2
L3
Initialization error
1
INT
OFF
OFF
OFF
ON
An error occurred during initialisation, in particular, the measured
opening quota is too low. Check the encoder, the connection
between the encoder and mother boards. Make sure the transit
area is free of obstacles. In the event of electronic lock, check
correct operations.
Door blocked error
2
INT
OFF
OFF
ON
OFF
The door cannot open. Make sure there are no obstacles in the
transit area and that there are no locks (electric or manual) that
block the door.
Anti-crushing error
3
INT
OFF
ON
OFF
OFF
After three closing and anti-crushing detection attempts. Make
sure there are no obstacles in the transit area. Make sure that
the anti-crushing sensitivity in opening is not too low. Check the
encoder, the connection between the encoder and mother
boards.
Inversion error
4
INT
OFF
ON
OFF
ON
An inversion error of the movement between the encoder and
motor was detected.
Overcurrent error
5
INT
ON
ON
ON
OFF
Motor overload detected. Make sure there are no short circuits
on the motor power cord. Check the motor and replace if
necessary.
Encoder error
6
INT
OFF
ON
ON
ON
Encoder malfunction detected.
Check the encoder, the connection between the encoder and
mother boards.
Operazioni
Descrizione
Multiple anti-crush
function whilst
opening (with
Autoreset after
malfunction)
Near the
closure
(gap of
around 0°
to 25°)
The door encounters an obstacle that stops its motion whilst it is opening. The device should stop the
motion of the door for a few seconds and then open it completely at low speed and close it again at normal
speed. After detecting the third obstacle without being able to complete the manoeuvre (without completely
opening the door), the device signals a malfunction (AV=intermittent and L1=On), stops for a few seconds
whilst closing and then performs a new reset to set the ends-of-stroke. If the object remains in the movement
area it will be detected as the end-of-stroke and the device will function with two new ends-of-stroke. If the
obstacle is near the door frame, the device will signal an initialization error that the door opening is too small
(AV=intermittent and L3=On). If the obstacle is later cleared, the device will function without an end-of-stro-
ke whilst opening for another two cycles, after which it will signal an error (AV=intermittent) because it can-
not find the end-of-stroke and will perform a new reset to set the ends-of-stroke.
In the
middle
(various
positions)
The door encounters an obstacle that stops its motion whilst it is opening. The device should stop the
motion of the door for a few seconds and then open it completely at low speed and close it again at normal
speed. After detecting the third obstacle without being able to complete the manoeuvre (without completely
opening the door), the device signals a malfunction (AV=intermittent and L1=On), stops for a few seconds
whilst closing and then performs a new reset to set the ends-of-stroke. If the object remains in the movement
area it will be detected as the end-of-stroke and the device will function with two new ends-of-stroke. If the
obstacle is later cleared, the device will function without an end-of-stroke whilst opening for another two
cycles, after which it will signal an error (AV=intermittent) because it cannot find the end-of-stroke and will
perform a new reset to set the ends-of-stroke.
Near the
opening
(gap of
around
70° to
90°)
Multiple anti-crush
function whilst clo-
sing (with
Autoreset after
malfunction)
Near the
closure
(gap of
around 0°
to 25°)
The door encounters an obstacle that stops its motion whilst it is closing. The device should stop the motion
of the door for a few seconds and then open it completely at low speed and close it again at low speed. After
detecting the third obstacle without being able to complete the manoeuvre (without completely closing the
door), the device signals a malfunction (AV=intermittent and L1=On), stops for a few seconds whilst closing
and then performs a new reset to set the ends-of-stroke. If the object remains in the movement area it will be
detected as the end-of-stroke and the device will function with two new ends-of-stroke. If the obstacle is later
cleared, the device will function without an end-of-stroke whilst opening for another two cycles, after which
it will signal an error (AV=intermittent) because it cannot find the end-of-stroke and will perform a new reset
to set the ends-of-stroke.
In the
middle
(various
positions)
Near the
opening
(gap of
around
70° to
90°)
The door encounters an obstacle that stops its motion whilst it is closing. The device should stop the motion
of the door for a few seconds and then open it completely at low speed and close it again at low speed. After
detecting the third obstacle without being able to complete the manoeuvre (without completely closing the
door), the device signals a malfunction (AV=intermittent and L1=On), stops for a few seconds whilst closing
and then performs a new reset to set the ends-of-stroke. If the object remains in the movement area it will be
detected as the end-of-stroke and the device will function with two new ends-of-stroke. If the obstacle is near
the door frame, the device will signal an initialization error that the door opening is too small (AV=intermit-
tent and L3=On). If the obstacle is later cleared, the device will function without an end-of-stroke whilst ope-
ning for another two cycles, after which it will signal an error (AV=intermittent) because it cannot find the end-
of-stroke and will perform a new reset to set the ends-of-stroke.
QKSW80
Содержание Swingy QK-SW80
Страница 1: ... QK SW80 USER MANUAL V01_2011 ...
Страница 19: ... QK SW80 ...







































































