

























Value
Description
0
Cut off power to the motor and Force is OFF.
1
Power to be supplied to the motor and Force is ON.
Parameter
Goal Position Range
Remark
Stroke Limit
Short Stroke Limit ~ Long Stroke
Limit
No limit on the available stroke
range, only limit G/P input range
(0~4095)
Position
Calibration
0 ~ 4095 (Full range)
Input range (0~4095) is not limited,
but the available stroke range may
vary.
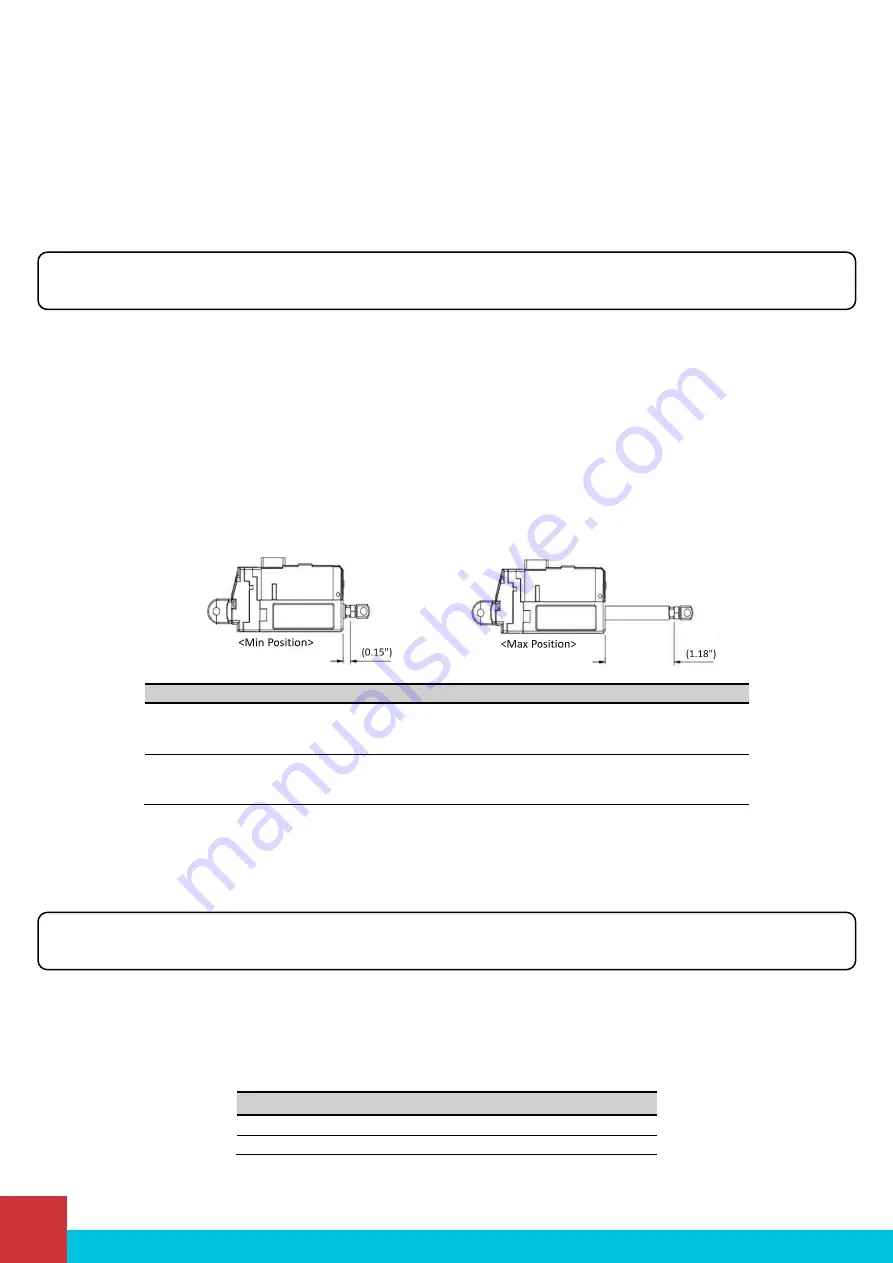
15. Min/Max Position Calibration [0~255 / Default: Individual Spec]
•
Min Position: Refers to the position of the minimum stroke when the Goal Position value is ‘0’.
•
Max Position: Refers to the maximum stroke position when the Goal Position value is ‘4095’.
•
Unlike the Stroke Limit command, the range of the Goal Position value [0~4095] is not limited and the length of the
used stroke gets changed.
•
Min/Max Position value of each actuator has a mechanical tolerance of ±0.5mm
So, Position Calibration Command can be used to synchronize the start and end positions of slightly different actuators
for the same Goal Position value by correcting each error value.
•
For example, if the Min Position Calibration value at Min Position 0.15” of PA-12-10645012R is 5, increasing the Min
Position Calibration value increases the Min Position value and the entire stroke range will be reduced as the Min
Position increases.
Volatile Memory
14. Position PID
Refers to the PID value for motor position control. If a PID value is larger than the set value is applied, the motor may
vibrate without stopping at the set position value due to an overshoot or over-response state and leading to a rough
operation against the error with the goal position.
If a PID value is smaller than the set value is applied, it operates smoothly with the goal speed, however, the error with the
goal speed value may appear large.
◦
Be careful about changing the value. Start by making small changes to the value first.
16. Force ON/OFF
Refers to the setting for Force ON and OFF (0: OFF, 1: ON)
Position PID is a non-volatile memory area. If you change the data, communication may stop for a short time
during the saving process. Therefore, please be careful of frequent value changes during operation.
It is a non-volatile memory area. If you change the data, communication may stop for a short time during saving
process. Therefore, please be careful of frequent value changes during operation.
P a g e | 22
Progressive Automations – Position Control Communication Protocol