





























Operation
44
Atlas
®
Digital Amplifier Complete Technical Reference
4
4.4.3
Phasing with an Encoder
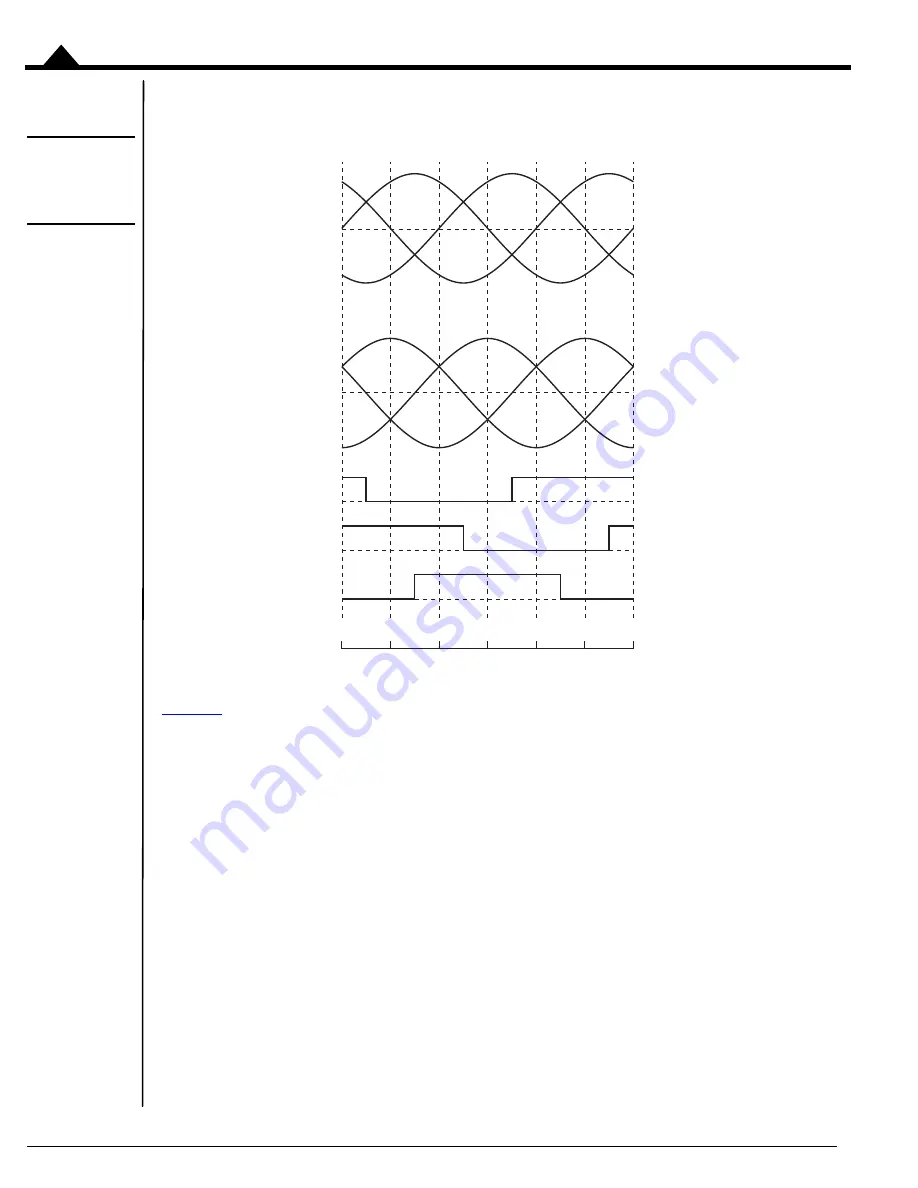
Figure 4-4:
Phasing
Reference
Signals
shows the relationship between a range of references signals such as Hall signals, and common
manufacturer-provided motor control waveforms. Note that these waveforms apply when the motor torque command
is positive. If negative, the sign of the “Phase Currents” and “Phase to phase BEMF Voltages” is inverted.
If the external controller uses an encoder to update the phase angle, the phase angle can be sent to Atlas with
significantly finer resolution than with Hall sensors (which resolve only to within 60 electrical degrees). Greater
commutation resolution allows the motion to be smoother and more efficient. However there are a few important
considerations when using an encoder for commutation compared to Hall sensors.
The first is that care should be taken to correctly update the phase angle at the encoder wraparound point. This is the
point at which the largest encoder value transitions to the smallest, or vice versa (depending on the motor direction).
At these points, the phase angle must still be smoothly and correctly updated as if an encoder wrap had not occurred.
The second is that if an incremental encoder is used and there is the possibility of losing counts, it is important that
this be corrected by the external controller. The most common approach toward accomplishing this is to utilize the
encoder’s Index pulse signal to record a fixed phase angle for the motor, and thereafter compare the incremental
encoder reading at each occurrence of the Index pulse. Please refer to the
Magellan Motion Processor User’s Manual
for
more information on this technique.
The third is known as phase initialization. In the case of incremental encoders, at power-up there is no explicit
correlation between the encoder position and the rotor angle, therefore the phasing must be initialized. By contrast,
180
180
Hall C
Hall B
Hall A
Phase-to-
phase BEMF
Votages
Phase
Angle
in degs
Phase
Currents
240
A-B
B-C
C-A
A
B
C
300
0
60
120





















































