





























No. SX-DSV02310 - 46 -
R2.0 Motor
Business
Division,
Appliances Company, Panasonic Corporation
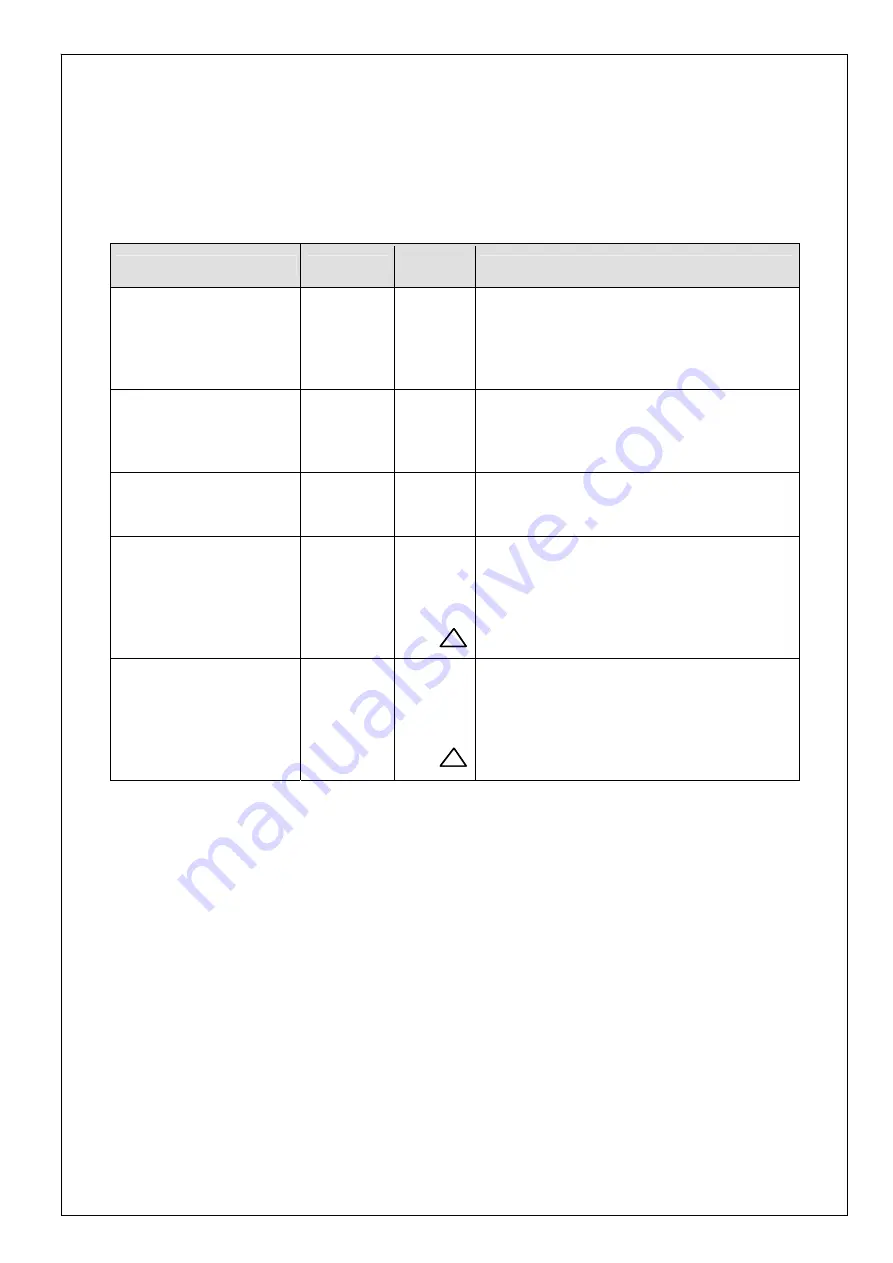
5. Cyclic Command Description
5-1 Cyclic command list [Under review]
Cyclic command requires no transfer procedure. That is, when received, it directly reflects on the control.
The cyclic command selects the control mode in the servo driver.
For relationship between the control mode and communication cycle/command updating cycle, refer to Section 2-5.
Control mode
Abbreviation
Command
_Code
Description
NOP NOP
0
h
For temporary transmission of invalid data
immediately after establishment of the network.
Never use this command for any other purpose.
Upon receiving this command, control is performed
based on the previously received command.
Profile Position Mode
PP
1
h
In this control mode, the target position, target
speed and acceleration/deceleration speed
(parameters) are specified and the position
command is generated in the servo driver.
Cyclic Position Mode
CP
2
h
In this mode, the host controller generates the
position command and updates it (or transmits
updated command) at the command updating cycle.
Cyclic Velocity Mode
CV
3
h
In this mode, the host controller generates the
velocity command and updates it (or transmits
updated command) at the communication cycle.
※
When this command is received in Block Diagram
of 2 Degrees of Freedom Mode, it causes the
command error.
Cyclic Thrust Mode
CT
4
h
In this mode, the host controller generates the thrust
command and updates it (or transmits updated
command) at the communication cycle.
※
When this command is received in Block
Diagram of 2 Degrees of Freedom Mode, it causes
the command error.
2.0
2.0
2.0
2.0





















































