





























No. SX-DSV02310 - 118 -
R2.0 Motor
Business
Division,
Appliances Company, Panasonic Corporation
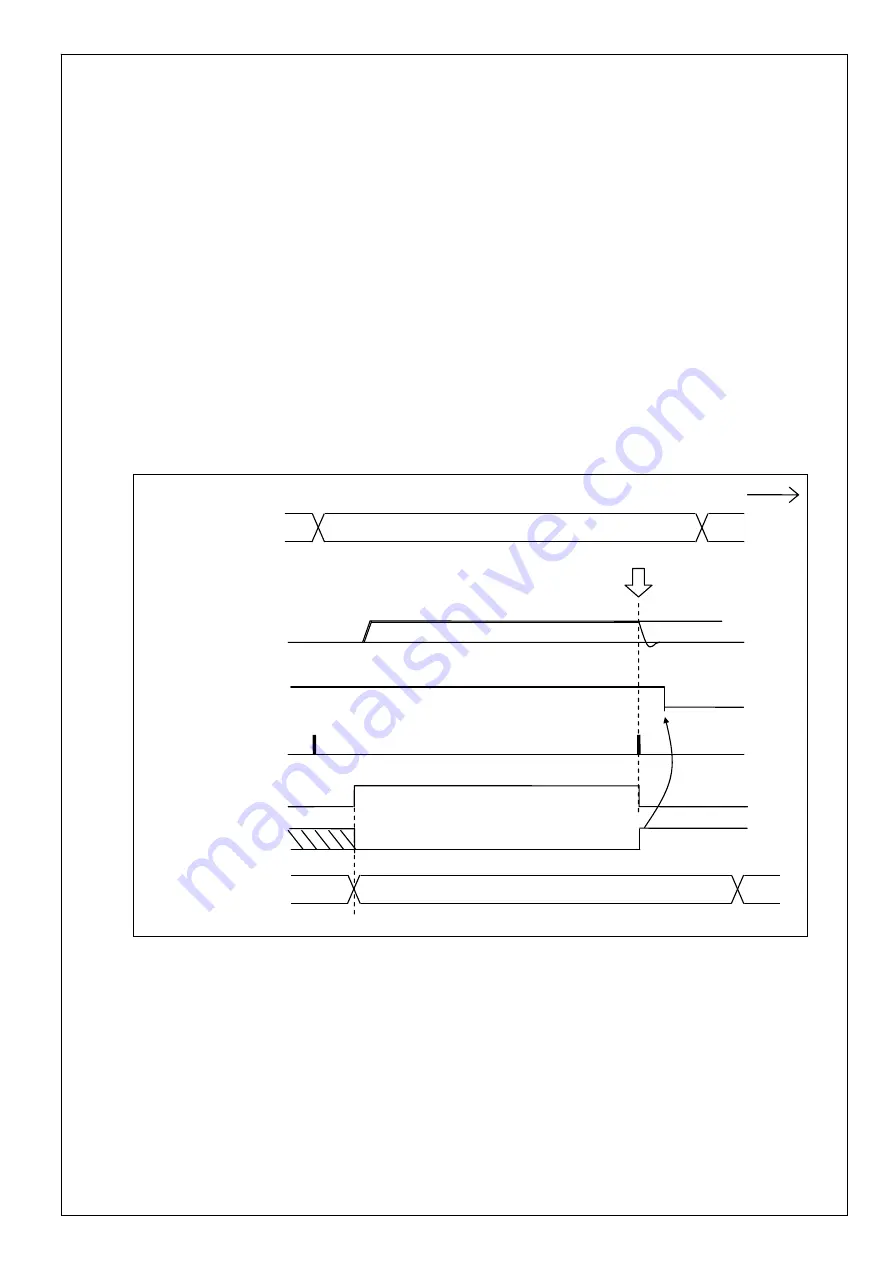
7-2-3-3 Example of cyclic homing operation 3
Below shows an example of return-to-home operation in the cyclic position control (CP) mode using the Z-phase of
feedback scale (zero position of single turn data) as the home.
1) Set Type_Code to Z phase of feedback scale (011h), set Homing_Ctrl bit to 1, and then change from normal
command (20h) to return-to-home command (24h).
Hold the return-to-home command until the homing process completes.
2) Execute the positioning according to command position, which is based on the position at power-up.
3) When the servo driver detects Z-phase of feedback scale, it will ignore command position and stop the motor
(servo-lock) at detected home position (Z-phase). Then it will set Homing_Complete bit to 1.
Note that during feedforward the value remains valid. If this causes a problem, keep feedforward value at 0
during homing process.
4) After confirming that Homing_Complete bit has become 1, set Homing_Ctrl bit to 0, and then set 0 (home
position) to command position.
5) Change the command code back to normal command (20h).
Then, positioning will start according to the new reference. Therefore, be sure to perform step 4) before changing
the command code back to the normal command.
*1) Command velocity is the differences of command position for the command update cycle. (It is internal
operation value of the servo driver.)
Command velocity
Homing_Ctrl
Actual velocity
Home position
*1)
Z-phase of
feedback scale
Velocity
20h
20h
24h
Command
code
Time
20h
20h
24h
Homing_Complete
Busy
Command
code
echo





















































