





























2. Specification
— 2-11 —
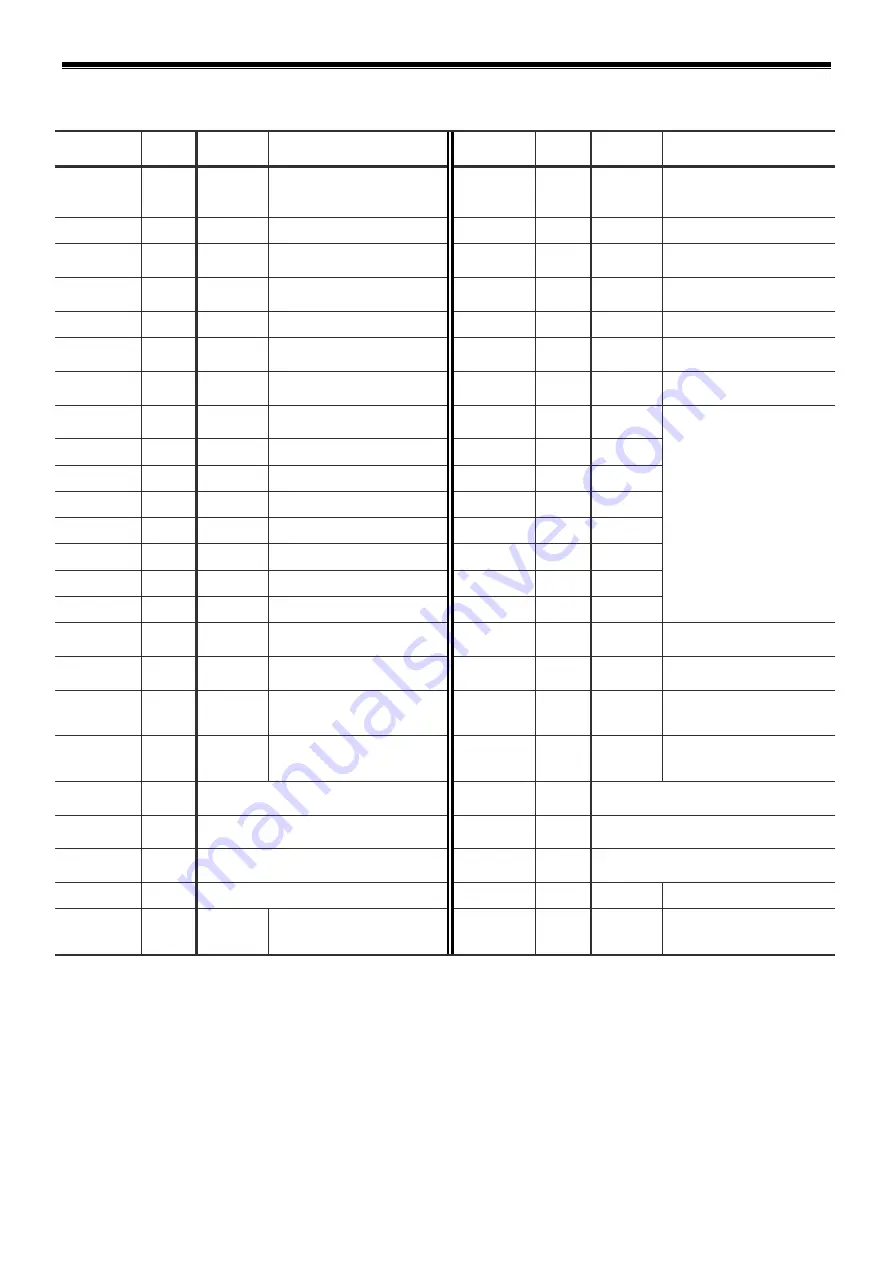
Table 2-12: Remote Input/Output
(m: A register number derived from the top station number)
Output
Port
code
Signal
code
Function Input
Port
code
Signal
code
Function
RXm0 PO0
DRDY
Reports that the Motor is
ready for the operation
RYm0 PI0 EMST
Interrupts the positioning
and stops with the dynamic
brake
RXm1 PO1 WRN
Alerts warning.
RYm1 PI1 ACLR
Clears warning
RXm2 PO2 OTPA
Over travel limit (+) (Soft and
hard ware limit switch)
RYm2 PI2
-
Reserved
*1
RXm3 PO3
OTMA
Over travel limit (-) (Soft and
hard ware limit switch)
RYm3 PI3
-
Reserved
*1
RXm4 PO4 SVST
Reports the state of the servo
RYm4 PI4
SVON
Turns the servo on
RXm5 PO5 BUSY
Reports the operation state
RYm5 PI5 RUN
Starts the program operation
specified by the PRG input
RXm6 PO6 IPOS
Reports the conditions in
position error and positioning
RYm6 PI6 STP
Stops positioning operation
RXm7 PO7
NEARA
Reports that the Motor is
approaching the target position
RYm7 PI7 PRG0
RXm8
-
-
(Reserved)
RYm8 PI8 PRG1
RXm9
-
-
(Reserved)
RYm9 PI9 PRG2
RXmA
-
-
(Reserved)
RYmA PI10 PRG3
RXmB
-
-
(Reserved)
RYmB PI11 PRG4
RXmC
-
-
(Reserved)
RYmC PI12 PRG5
RXmD
-
-
(Reserved)
RYmD PI13 PRG6
RXmE
-
-
(Reserved)
RYmE PI14 PRG7
A combination of 1 and 0
(ON/OFF) of the“Internal
program channel selection”
selects a channel to be
executed (Channel 0 -255)
RXmF
-
-
(Reserved)
RYmF PI15 JOG
Starts and stops a jog
operation
RX(m
+
1)0
-
-
(Reserved)
RY(m
+
1)0
PI16 DIR
Specifies the direction of a
jog operation
RX(m
+
1)1
to
RX(m
+
2)F
-
-
(Reserved)
RY(m
+
1)1
to
RY(m
+
2)F
-
-
(Reserved)
RX(m
+
3)0
to
RX(m
+
3)7
-
-
(Reserved)
RY(m
+
3)0
to
RY(m
+
3)7
-
-
(Reserved)
RX(m
+
3)8
-
Flag for processsing an initial data
(Not used)
RY(m
+
3)8
-
Flag for completion of initial data
processing. (Not used)
RX(m
+
3)9
-
Flag for “End of initial data setting”
(Not used)
RY(m
+
3)9
-
Flag for initial data setting (Not used)
RX(m
+
3)A
-
Flag for positioning state (Not used)
RY(m
+
3)A
-
Flag for requesting error reset (Not
used)
RX(m
+
3)B
-
The remote station is ready
RY(m
+
3)B
-
-
(Reserved)
RX(m
+
3)C
to
RX(m
+
3)F
-
-
(Reserved)
RY(m
+
3)C
to
RY(m
+
3)F
-
-
(Resrved)
*1: The shipping set of PI2 and PI3 ports is assigned to signals of OTP and OTM respectively. These are the dedicated input signals from
the CN2: control I/O connector. An input from the CC-Link to these OTP and OTM function ports shall become invalid.
The PI0 and PO0 are dedicated ports for the signals fundamental to the safety function. There are
following restrictions respectively.
◊
You cannot change the function EMST(Emaergency stop) assigned to the Port PI0 (RYm0).
◊
The Output DRDY (Driver Unit Ready) assigned to the Port PO0 (RXm0) is only
interchangeable with the function of NRM(Normal).
Refer to “3.5 Function Assignment of Control Input/Output” for the logic of each function.
Содержание MEGATORQUE MOTOR SYSTEM
Страница 4: ... ii Blank Page ...
Страница 6: ...1 Introduction 1 2 Blank Page ...
Страница 20: ...2 Specification 2 14 Blank Page ...
Страница 40: ...3 Operation 3 20 Blank Page ...
Страница 44: ......







































































