





























InSight Radar (IR2) (IR2-HD2 and Higher Models)
Nobeltec
47
Installer’s Guide
The PC Connection
Figure 4.15—Compass Heading Corrections window
5. Click
OK
to close the window.
Adjusting the Radar Heading Line Rotation
This process allows you to align the radar transceiver with the center line of the
vessel and only needs to be set once. This is a different function than aligning your
heading sensor so make sure you are adjusting the radar’s physical heading line to
match the center line of your vessel.
One way to do this is to simply eyeball the difference. However, it is easiest to do this
using the radar overlay feature. If the charted land does not appear to line up cor-
rectly with the radar return for the same land mass, use the rotate scroll bar to adjust
the rotation angle until the overlaid image aligns correctly.
Remember
: Make sure you have a heading sensor connected to the PC.
Without a heading sensor, the Nobeltec Navigation Software cannot align
the image correctly onto the chart. To see if you have heading connected,
add the Heading console item to the console and verify that it does not read
N/A under
Tools | Options | Console | Heading
check box.
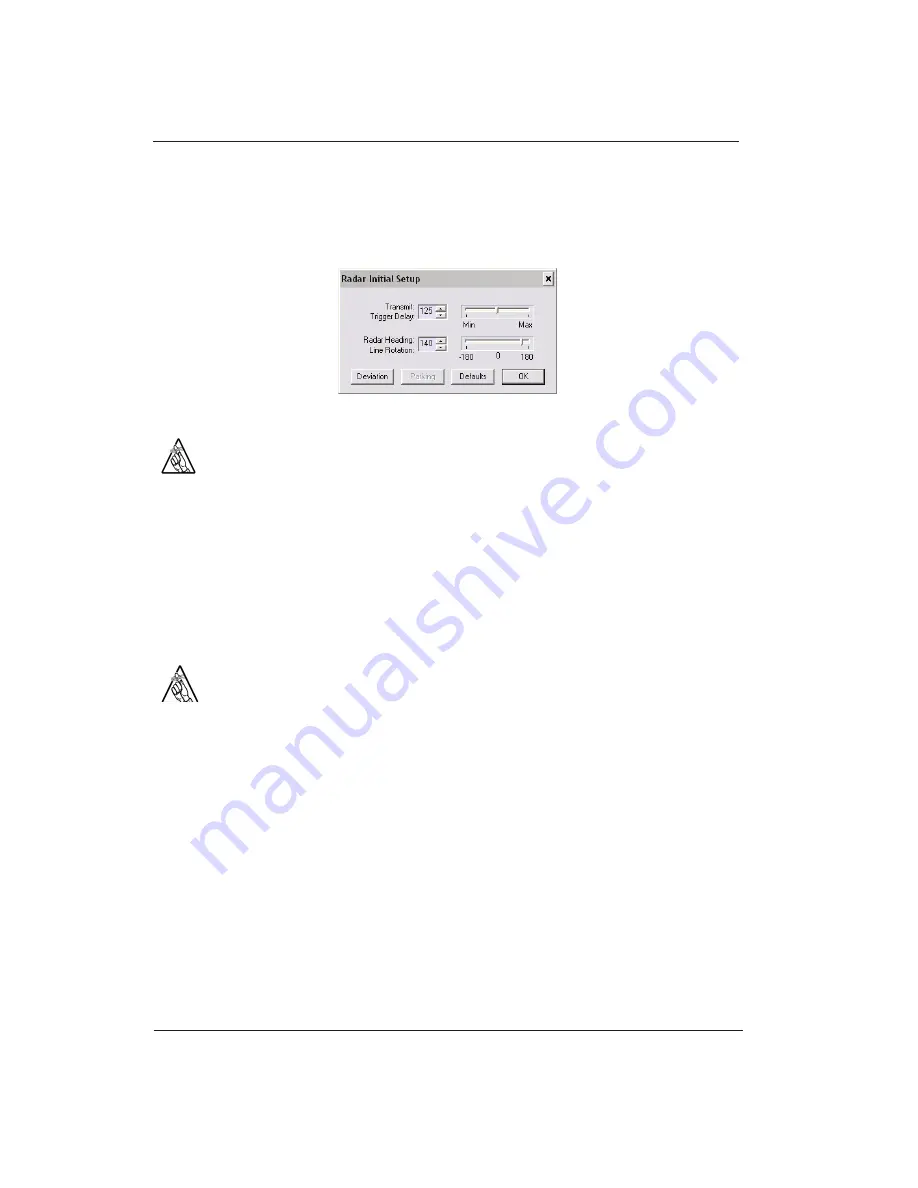
To adjust the Transmit Trigger Delay setting:
1. Start the Nobeltec Navigation Software and open the InSight Radar window.
2. When a radar image appears, click the Radar drop-down menu; then select
Initial
Radar Setup
.
Enter the compass master
correction value in the field
provided.
Because the master value
affects all degrees equally,
make sure that you enter it
before you proceed to
creating a compass
deviation table.
Figure 4.16—Radar Initial Setup
Remember
: The Radar Heading Line is a one-time setup. Once you have it
corrected, there should not be a regular need to adjust this setting. Align-
ment issues while underway are typically a function of compass deviation
challenges.
Creating a Compass Deviation Table
Due to magnetic interferences and other considerations, magnetic compasses can
provide inaccurate information. To complicate this matter, the level of heading
inaccuracy can change at each compass heading. To resolve this, inside the Nobeltec
Navigation Software is a table that allows you to enter correction values at each 5°
increment
.
Tip
: Using a Combination GPS Heading sensor that determines heading
based on dual GPS antennas instead of magnetic significantly improves the
accuracy of incoming heading data and simplifies the radar alignment
process.
Once you have resolved the radar heading line and compass master rotations, you
now need to test the radar alignment at various headings to discover the onboard
deviations. The easiest way to do this is to be on the water in a clear open area and
drive at each heading for a short while correcting the deviation as you go.
The following example is one way to do this:
1. Once on the water with the Nobeltec Navigation Software running with radar and the
heading sensor, open the
Compass deviation Adjustment
tool (click the
Deviation
entry
button in the
Compass Heading Corrections
window - shown above)
Содержание IR2-HD2
Страница 2: ......
Страница 8: ...Page intentionally left blank...
Страница 81: ...Page intentionally left blank...
Страница 82: ...www nobeltec com Printed in USA Press Date January 2011 2011 Nobeltec Inc All rights reserved 1 2011...







































































