





























www.nexusrobot.com Robot Kits manual
99
See:
Omni3WD::getSwitchMotorsStat
()
unsigned char
switchMotorsReset
()
Reset for switch motors to control
unsigned int
setMotorAll
(unsigned int speedMMPS=0,bool dir=DIR_ADVANCE)
Set all motors’ speed and direction
This will lie within the range specified at
Omni4WD::
wheelULSetSpeedMMPS
() and
Omni4WD::wheelLLSetSpeedMMPS
() and
Omni4WD::wheelLRSetSpeedMMPS
() and
Omni4WD::wheelURSetSpeedMMPS
()
Parameters:
unsigned int speedMMPS=0
The speed for the motor run,initialize it.
bool dir=DIR_ADVANCE
The direction the motor run
See:
Omni4WD::
wheelULSetSpeedMMPS
()
Omni4WD::wheelLLSetSpeedMMPS
()
Omni4WD::wheelLRSetSpeedMMPS
()
Omni4WD::wheelURSetSpeedMMPS
()
unsigned int
setMotorAllStop
()
Set all Motors stop
This will lie within the range specified at
Omni4WD::setMotorAll
()
See:
Omni4WD::setMotorAll
()
unsigned int
setMotorAllAdvance
(unsigned int speedMMPS=0)
Set all motors run forward
This will lie within the range specified at
Omni4WD::setMotorAll
()
Parameters:
unsigned int speedMMPS=0
The speed for the motor run,initialize it.
See:
Omni4WD::setMotorAll
()
unsigned int
setMotorAllBackoff
(unsigned int speedMMPS=0)
Set all motors run back off
Содержание Nexus Robot
Страница 74: ...www nexusrobot com Robot Kits manual 70 Sample Wiring Diagram for RB004 2WD V2 0...
Страница 92: ...www nexusrobot com Robot Kits manual 88 Diagram for Omni3WD_V1 0...
Страница 96: ...www nexusrobot com Robot Kits manual 92 Diagram_Omni3WD_V3 3...
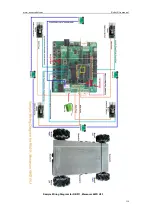
Страница 118: ...www nexusrobot com Robot Kits manual 114 Sample Wiring Diagram for RB011 Mecanum 4WD V4 1...
































































