





























5 Menu tree
5.4 MAIN MENU – Config
FST-2_HB.EN12/05
111
5.4 MAIN MENU – Config
All menu items with adjustable values can be deactivated by entering the
value “0”.
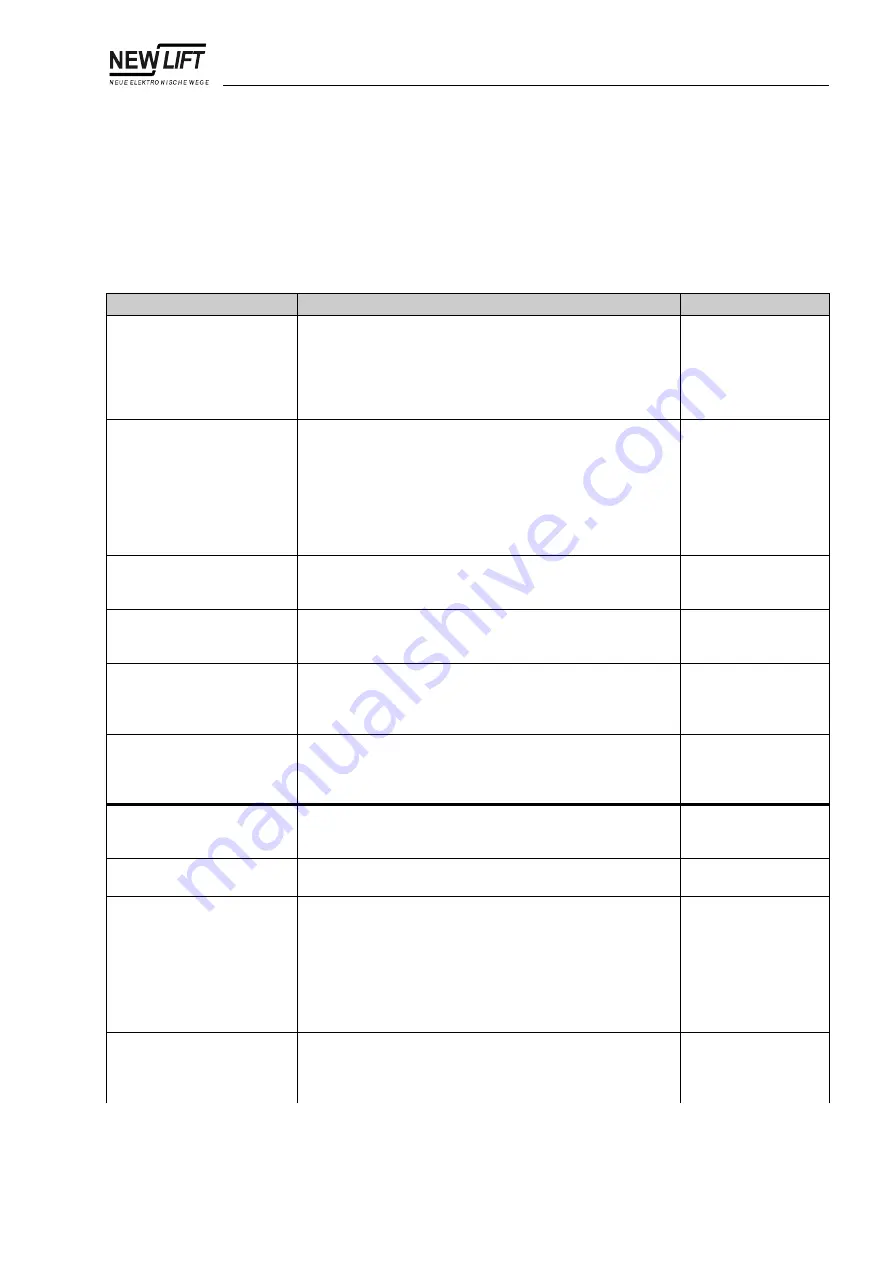
Menu item
Description
Setting range
Installation –
Calibration drive
Carry out calibration drive. During a calibration drive, four
measuring drives are performed for each drive speed. The
exact acceleration and braking behaviour for each speed is
determined automatically. The controller uses this information
to select the optimum speed and the correct braking point for
each drive.
³
YES
NO
Installation –
Learn drive
Carry out learn drive. During the learn drive, the car
automatically travels upwards through the entire shaft at
inspection speed. The controller determines the exact position
of the solenoids for solenoid switches “Zone B”, “Correction
bottom” and “Correction top”. The levelling positions of all
floors are automatically centred in the door zones after the
learn drive! The learn drive is only required when using
incremental positioning.
³
YES
NO
Installation –
Set floor [n]
The current position of the car is entered as a point of
reference for the entire shaft. The levelling positions of the
remaining floors are adjusted to the current position of the car.
0 .. top floor
Installation –
Correct-levelling
Correction of the levelling position on the floor where the car
is currently located. The measured value must be entered (car
is too high: positive sign +; car is too low: negative sign -).
-250 .. 250 mm
Installation –
Cal. V-tolerance
Measuring tolerance when measuring the speed of the
calibration run. The set value should only be changed after
consulting NEW LIFT. The calibration results are influenced
by the measuring tolerance.
1 .. 100 %
Installation –
Installation mode
Suppresses error messages that would prevent installation
drives if the controller has not yet been fully commissioned.
Enables installation drives using the inspection and auxiliary
controls without connecting encoder and car control module.
ON
OFF
Prio-Landing/Car –
Landing prio. type
Activation type “Priority landing”.
-
Hard: All car and landing calls are deleted.
-
Soft: Car calls remain, landing calls are deleted.
Hard
Soft
Prio-Landing/Car –
Landing prio. time
Delay for switching off “Priority landing” after reaching the
target floor.
0 .. 999 sec
Prio-Landing/Car –
Landing prio. prog.
Variations of “Priority landing”:
-
Auto 1: After reaching the target floor, the “Priority landing”
state remains active until the next car call.
-
Auto 2: After reaching the target floor, “Priority car” is
activated automatically.
-
Standard: When reaching the target floor, the system
switches to normal operation after the “
Landing prio.
time
” has elapsed.
Auto 1
Auto 2
Standard
Prio-Landing/Car –
Car prio. type
Activation type “Priority car”
-
Hard: All car and landing calls are deleted.
-
Soft: Car calls remain, landing calls are deleted if
Keep
landing calls = NO
is set.
Hard
Soft
Содержание FST-2
Страница 6: ...Table of contents 4 FST 2_HB EN12 05...
Страница 98: ...5 Menu tree 5 1 General 96 FST 2_HB EN12 05 Fig 5 1 FST 2 Controller menu tree part 1...
Страница 99: ...5 Menu tree 5 1 General FST 2_HB EN12 05 97 Fig 5 2 FST 2 Controller menu tree part 2...
Страница 100: ...5 Menu tree 5 1 General 98 FST 2_HB EN12 05 Fig 5 3 FST 2 Controller menu tree part 3...
Страница 101: ...5 Menu tree 5 1 General FST 2_HB EN12 05 99 Fig 5 4 FST 2 Controller menu tree part 4...
Страница 102: ...5 Menu tree 5 1 General 100 FST 2_HB EN12 05 Fig 5 5 FST 2 Controller menu tree part 5...
Страница 103: ...5 Menu tree 5 1 General FST 2_HB EN12 05 101 Fig 5 6 FST 2 Controller menu tree part 6...
Страница 104: ...5 Menu tree 5 1 General 102 FST 2_HB EN12 05 Fig 5 7 FST 2 Controller menu tree part 7...
Страница 105: ...5 Menu tree 5 1 General FST 2_HB EN12 05 103 Fig 5 8 FST 2 Controller menu tree part 8...
Страница 112: ...5 Menu tree 5 3 MAIN MENU Drive 110 FST 2_HB EN12 05 Fig 5 10 Drive with speed correction function...
Страница 133: ...5 Menu tree 5 5 MAIN MENU Positioning FST 2_HB EN12 05 131 Fig 5 13 Parameters for linear positioning...
Страница 134: ...5 Menu tree 5 5 MAIN MENU Positioning 132 FST 2_HB EN12 05 Fig 5 14 Additional parameters for incremental positioning...
Страница 140: ...5 Menu tree 5 7 MAIN MENUE System 138 FST 2_HB EN12 05 Event channels Fig 5 16 Event channels of the FST 2 Controller...
Страница 174: ...6 Programmable inputs and outputs 172 FST 2_HB EN12 05...