





























POC-300 Series
90
4.8
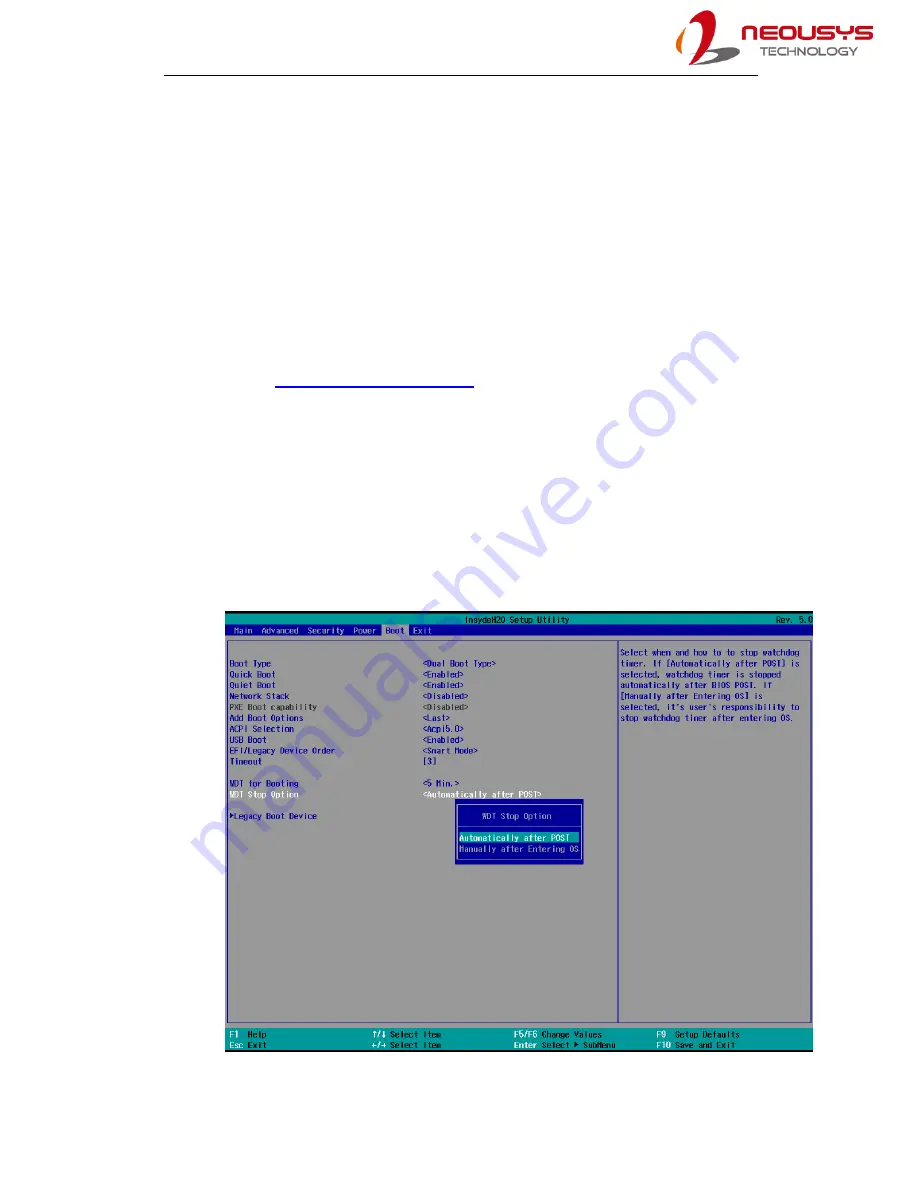
Watchdog Timer
The watchdog timer secures the boot process by means of a timer. Once the timer
expires, a reset command is issued to initiate another booting process. There are
two options in BIOS menu, “
Automatically after POST
” and “
Manually after Entering
OS
”. When “
Automatically after POST
” is selected, the BIOS automatically stops the
watchdog timer after POST (Power-
On Self Test) OK. When “
Manually after Entering
OS
” is selected, the user must stop the watchdog timer once booted into the OS.
This guarantees the system can always boot into the OS, otherwise another booting
process will be initiated. For information about programming watchdog timer, please
refer to
Appendix A Using WDT & DIO
.
To set the watchdog timer for boot in BIOS:
1.
Press
F2
when the system boots up to enter the BIOS setup utility.
2.
Go to
[Boot]
menu.
3.
Disable or select timeout value for
[WDT for Booting]
option.
4.
Once you set a timeout value, the
[WDT Stop Option]
option appears. You can
select either
“Automatically after POST”
or
“Manually after Entering OS”
.
5.
Once set, press
F10
to save setting and exit.
Содержание POC-300
Страница 1: ...Neousys Technology Inc POC 300 Series User Manual Revision 1 0 ...
Страница 4: ...Table of Contents 4 StopDICOS 108 DI COS Example 108 ...
Страница 20: ...POC 300 Series 20 1 5 Dimension 1 5 1 Superior View NOTE All measurements are in millimeters mm ...
Страница 21: ...POC 300 Series 21 1 5 2 Front Panel View NOTE All measurements are in millimeters mm ...
Страница 22: ...POC 300 Series 22 1 5 3 Bottom View NOTE All measurements are in millimeters mm ...
Страница 24: ...POC 300 Series 24 1 6 2 Wall Mount Bracket WM 300V NOTE All measurements are in millimeters mm ...
Страница 25: ...POC 300 Series 25 1 6 3 Wall Mount Bracket WM 300H NOTE All measurements are in millimeters mm ...
Страница 58: ...POC 300 Series 58 5 Reinstall the system enclosure ...
Страница 110: ...POC 300 Series 110 printf StopDICOS PASSED n printf npress any key to exit n system pause nul return 0 ...